Our research is antidisciplinary and it sits somewhere on the intersection of the areas of Machine learning and statistics, signal processing, automatic control and computer vision. We pursue both basic and applied research, which explains our tight collaboration with various companies. A slightly more detailed overview of our research is available here.
Recent research results/news
December 20, 2022 [Two tenure track Assisstant Professorships available] In 2023 we are launching the Beijer laboratory for Artificial Intelligence. For this reason we have opened two tenure track Assistant Professorships, one directed towards applications in life sciences [here] and one towards the societal impacts [here]. These positions will extent and complement our existing research and education within artificial intelligence and machine learning.
December 15, 2022 [Short Team update] Dominik Baumann who has been a post-doc in the team for a year will after the Holidays start a tenure track position as Assistant Professor at Aalto University (Espoo, Finland). He will remain affiliated with us and the collaborations we have started will of course continue. During the first half of next year Antonio Ribeiro will spend roughly 3 months in the team of Francis Bach at The Ecole Normale Supérieure (Paris, France) to explore some mutual interests. Daniel Gedon will do his pre-doc with Mikhail Belkin and his team at the University of California San Diego (USA), where he will spend roughly 3 months.
November 28, 2022 [Paper accepted for TMLR] We have been working on incorporating existing background knowledge into Machine Learning models for quite some time and in this paper we provide new results for the multitask Gaussian processes. We show how to include background knowledge in the form of constraints that require a specific sum of the outputs to be constant. This is achieved by conditioning the prior distribution on the constraint fulfillment. The approach allows for both linear and nonlinear constraints.
Philipp Pilar, Carl Jidling, Thomas B. Schön and Niklas Wahlström. Incorporating sum constraints into multitask Gaussian processes. Transactions on Machine Learning Research (TMLR), 2022. [TMLR]
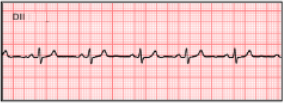
November 11, 2022 [Paper accepted for Scientific Reports] Heart attacks is a common challenge in the emergency department. In managed settings, deep learning-based models and especially convolutional deep models have shown promise in electrocardiogram (ECG) classification, but there is a lack of high-performing models for the diagnosis of heart attacks in real-world scenarios. We have developed a deep learning model using ECGs to predict myocardial infarction in real-world emergency department patients. We studied emergency department patients in the Stockholm region between 2007 and 2016 that had an ECG obtained because of their presenting complaint. This work marks our start on this important problem.
Stefan Gustafsson, Daniel Gedon, Erik Lampa, Antonio H. Ribeiro, Martin J. Holzmann, Thomas B. Schön and Johan Sundström. Development and validation of deep learning ECG-based prediction of myocardial infarction in emergency department patients. Scientific Reports, 12:19615, 2022. [nature]
September 8, 2022 [New paper accepted] Together with Adrian Wills at the University of Newcastle (Australia) I was invited to write a tutorial paper on SMC, which is now accepted for publiction.
Adrian Wills and Thomas B. Schön. Sequential Monte Carlo: a unified review. Annual Review of Control, Robotics, and Autonomous Systems, 2022 (accepted)
September 1, 2022 [New team members] I am very glad to welcome two new members to the team, namely Ziwei Luo who just started as a PhD student. We also have a new pre-doc, Tim Martin who is visiting from Frank Allgöwer's group at the University of Stuttgart. Very much look forward to working with both of you!
August 30, 2022 [New paper accepted] Long time ago I was thinking about how variational inference can be used for estimating the states and the parameters in nonlinear state-space models. Now we have published a way of doing this for both states and parameters, the system identification solution was just accepted for Automatica and the state estimation solution was published in IEEE TSP some time ago, see this link (also on arXiv).
Jarrad Courts, Adrian Wills, Thomas B. Schön and Brett Ninness. Variational system identification for nonlinear state-space models. Automatica. (accepted) [arXiv]
June 28, 2022 [Two new papers accepted] The sampling and resampling steps of the particle filter are challenging to differentiate. The reparameterisation trick was introduced to allow sampling steps to be reformulated as differentiable functions. We have extend the reparameterisation trick to include the stochastic input to allow for better differentiation of the resampling step. This allows us to compute gradients which we can then use for example together with particle Markov Chain Monte Carlo (p-MCMC) and the No-U-Turn Sampler (NUTS) as the proposal when estimating parameters. In the second paper we offer some insights into how nonlinear state-space models and the particle filter can be used to predict political violence using data from our colleagues at the Department of Peace and Conflict Research, the ViEWS project.
Conor Rosato, Paul Horridge, Thomas B. Schön and Simon Maskell. Efficient learning of the parameters of non-linear models using differentiable resampling in particle filters. IEEE Transactions on Signal Processing, 2022.
Andreas Lindholm, Johannes Hendriks, Adrian Wills and Thomas B. Schön. Predicting political violence using a state-space model. International Interactions, 2022.
May 12, 2022 [Three new papers accepted] Recently the following three papers have been accepted.
Li-Hui Geng, Adrian Wills , Brett Ninness and Thomas B. Schön. Smoothed state estimation via efficient solution of linear equations. IEEE Transactions on Automatic Control, 2022.
Carl Jidling, Adrian Wills, Andrew Flemming and Thomas B. Schön. Memory Efficient Constrained Optimization of Scanning-Beam Lithography. Optics Express, 2022. [pdf]
Niklas Gunnarsson, Jens Sjölund, Peter Kimstrad and Thomas B. Schön. Unsupervised dynamic modeling of medical image transformations. The 25th International Conference on Information Fusion, July, 2022, Linköping, Sweden.
May 12, 2022 [PhD defence - Carl Jidling] On June 3 my student Carl Jidling will defend his thesis, entitled Tailoring Gaussian processes and large-scale optimisation. The thesis is available here. The opponent is Professor Lars Kai Hansen (Technical University of Denmark), and the grading committe consists of Docent Pontus Giselsson (Lund University), Professor Fredrik Kahl (Chalmers) and Docent Josephine Sullivan (KTH) .
May 12, 2022 [PhD defence - Carl Andersson] On May 24, my student Carl Andersson will defend his thesis, entitled Deep probabilistic models for sequential and hierarchical data. The thesis is available here. The opponent is Professor Roy Smith (ETH, Zurich, Switzerland) and the grading committe consists of Professor Hedvig Kjellström (KTH), Professor Lennart Svensson (Chalmers) and Docent Gustaf Hendeby (Linköping University).
March 11, 2022 [Popular scientific videos] Two of my students produced this video (English) (Swedish) where they explain the essence of how machine learning works and how it can be used to help doctors discover heart attacks from patient ECGs. See also this blog post. The explanation is based on the concept of straight lines, and is specifically tailored to grade 7-9 students.

January 18, 2022 [Paper accepted for AISTATS] Energy-based models (EBMs) are a useful core when it comes to solving regression problems using deep learning. One part of designing these algorithms has been very frustrating, namely the need to manually come up with a proposal distribution. In this work we address this by introducing a conceptually simple method to automatically learn an effective proposal distribution, which is parameterized by a separate network head. We also derive a somewhat surprising result, leading to a unified training objective that jointly minimizes the KL divergence from the proposal to the EBM, and the negative log-likelihood of the EBM. At test-time, we can then employ importance sampling with the trained proposal to efficiently evaluate the learned EBM and produce stand-alone predictions.
Fredrik K. Gustafsson, Martin Danelljan and Thomas B. Schön. Learning proposals for practical energy-based regression. In Proceedings of the 25nd International Conference on Artificial Intelligence and Statistics (AISTATS), Online, March, 2022. [arXiv]
January 18, 2022 [Hiring PhD students and a post-doc!] Several students are currently finishing up their work to graduate later this spring, which is great and we want to continue, hence we are offering two PhD positions in Machine Learning method development. The advertisement is available here (deadline: March 21, 2022).
We also have a post-doc position available. This is a joint project on the topic of deep learning-based methods for dynamic structure determination together with Johan Elf at the Department of Cell and Molecular Biology here in Uppsala. The advertisement is available here (deadline: March 14, 2022).
Feel free to spread the word about these positions!
2021
October 29, 2021 [Best PhD thesis award to Antônio Ribeiro] Antônio Ribeiro has just been awarded the best thesis award in the area of engineering and physical sciences at the Universidade Federal de Minas Gerais (UFMG), Belo Horizonte, Brazil. His thesis is available here. [news]

October 26, 2021 [New results on AI-based ECG interpretation] Myocardial infarctions (MIs) are often missed in the emergency department. In managed settings deep learning models have shown promise in electrocardiogram (ECG) classification. However, in a real-world scenario there is a lack of high performing models for classification of MIs. We developed a ResNet-based deep neural network to classify the ECG between non-ST-elevation myocardial infarction (NSTEMI), ST-elevation myocardial infarction (STEMI), and control status in the more challenging real-world setting. Our results are on par with human-level performance reported in previous studies for STEMIs and above human-level for NSTEMIs. These preliminary findings has been accepted to be presented at the NeurIPS workshop Machine Learning From Ground Truth: New Medical Imaging Datasets For Unsolved Medical Problems.
Daniel Gedon, Stefan Gustafsson, Erik Lampa, Antonio H. Ribeiro, Martin J. Holzmann, Thomas B. Schön and Johan Sundström. ResNet-based ECG diagnosis of myocardial infarction in the emergency department. In Workshop on Machine learning from ground truth: new medical imaging datasets for unsolved medical problems at the Conference on Neural Information Processing Systems (NeurIPS), Online, 2021.
October 18, 2021 [New VI algorithms for nonlinear state estimation in IEEE TSP] Ever since I first read about variational inference (VI) I have wondered about how it can be used to solve the nonlinear state filtering and smoothing problems for nonlinear systems. The first serious attempt to develop this started while I was visiting Newcastle (Australia) back in 2019 where Jarrad Courts and Adrian Wills also got interested in the problem. We now have a solution to this problem that works well. The key was to think hard about how to tailor the parametric form of the assumed posterior distributions, not relying on the classic mean-field approximation. Actually, I think that the idea of departing from the simple mean-field approximation is generally an important way forward for improved performance in many applications.
Jarrad Courts, Adrian Wills and Thomas B. Schön. Gaussian variational state estimation for nonlinear state-space models. IEEE Transactions on Signal Processing, 2021. [arXiv]
September 14, 2021 [Short team update] I am very glad to welcome new members to the team. Bernhard Wullt has joined us as an industrial PhD student with ABB Robotics. This position is funded by WASP. Earlier this month we also welcomed Fabio Bonassi who will do a pre-doc with us until the end of the year. Fabio is a PhD student with Politecnico di Milano, Milan, Italy. Fredrik Gustafsson just finished his three months internship with Facebook Reality Labs Research in Pittsburgh, PA, USA. John Moberg is on leave this autumn working for depict.ai. I also have two new post-docs joining after Christmas thanks to funding made available from the Kjell and Märta Beijer foundation. Dominik Baumann currently at RWTH Aachen University (Germany) and previously at the Max Planck Institute for Intelligent Systems (Germany). Cagatay Yildiz, who is just finishing up his PhD thesis at Aalto university and doing an internship with Bosch AI in Renningen (Germany) this autumn. Our recently hired tenure track Assistant Professor Jens Sjölund (previously with Elekta) has just hired a PhD student Jennifer Andersson and two post-docs: Zheng Zhao (from Aalto university, Finland) and Sebastian Mair (from Leuphana University of Lüneburg, Germany) who will also join us this autumn. I very much look forward to see what we can create together over the coming years! Welcome to all of you!!
[August 31, 2021 We are hiring an Associate Professor in Automatic Control] More information is available here.
August 18, 2021 [Paper published in Nature Communications] We have an active research program on the use of AI (deep learning based models) to automate the extraction of information from the electrocardiogram (ECG). The key finding in this paper is that the age predicted by the model (using the raw ECG recording as input) can be used to gauge cardiovascular health. We have trained a deep neural network to predict a patient’s age from the 12-lead ECG in the CODE study cohort (n = 1 558 415 patients). We show that patients with ECG-age more than 8 years greater than the chronological age have a higher mortality rate, whereas those with ECG-age more than 8 years smaller, have a lower mortality rate. These results show that the AI-enabled analysis of the ECG can add prognostic information.
Emilly M. Lima, Antônio H. Ribeiro, Gabriela M. M. Paixão, Manoel Horta Ribeiro, Marcelo M. Pinto-Filho, Paulo R. Gomes, Derick M. Oliveira, Ester C. Sabino, Bruce B. Duncan, Luana Giatti, Sandhi M. Barreto, Wagner Meira Jr, Thomas B. Schön and Antonio Luiz P. Ribeiro. Deep neural network estimated electrocardiographic-age as a mortality predictor. Nature Communications, 12(5117), 2021. [Nature]
July 27, 2021 [Two papers accepted for this years CDC] The first paper is rather technical in nature and it puts forward new variations of Willems’ fundamental lemma that utilize second-order moments such as correlation functions in the time domain and the power spectra in the frequency domain. The second paper is the conference version of the paper that was previously accepted for the IEEE Control Systems Letters (L-CSS) available on arXiv and IEEE Explore. The main contribution of that paper is the formulation of a general control problem where the emphasis is moving from system data to control action.
Mina Ferizbegovic, Håkan Hjalmarsson, Per Mattsson and Thomas B. Schön. Willems' fundamental lemma based on second-order moments. In IEEE Conference on Decision and Control (CDC), Online, December 2021.
Johannes Hendriks, James Holdsworth, Adrian Wills, Thomas B. Schön and Brett Ninness. Data to controller for nonlinear systems: an approximate solution. In IEEE Conference on Decision and Control (CDC), Online, December 2021. Jointly published in the IEEE Control Systems Letters (L-CSS), 6:1196--1201, 2022.

June 24, 2021 [Paper accepted for IEEE Sensors Journal] In this work we return to intertial sensors for the first time in a while. This time we look at a sensor array build by my co-authors from KTH. The scientific contribution is an algorithm to estimate and quantify the uncertainty of the accelerometers’ relative geometry in an inertial sensor array. We formulate the calibration problem as a Bayesian estimation problem and propose an algorithm that samples the accelerometer positions’ posterior distribution using Markov chain Monte Carlo. By identifying linear substructures of the measurement model, the unknown linear motion parameters are analytically marginalized, and the remaining non-linear motion parameters are numerically marginalized. We show that the calibration algorithm gives good results on both simulated and experimental data.
Håkan Carlsson, Isaac Skog, Thomas B. Schön and Joakim Jaldén. Quantifying the uncertainty of the relative geometry in inertial sensors arrays. IEEE Sensors Journal, 2021. (accepted for publication) [pdf]
June 20, 2021 [Paper accepted for Computing in Cardiology Conference (CinC)] The contribution of this paper is a self-supervised learning method for 12-lead electrocardiograms (ECGs). Self-supervised learning is a paradigm that extracts general features which describe the input space by artificially generating labels from the input without the need for explicit annotations. The learned features can then be used by transfer learning to boost the performance on a downstream task. Such methods have recently produced state of the art results in natural language processing and computer vision. For pretraining the model we design a task to mask out subsegements of all channels of the input signals and try to predict the actual values. As the model architecture, we use a U-ResNet containing an encoder-decoder structure. The method does provide modest improvements in performance when compared to not using pretraining. In future work we will make use of these ideas in smaller dataset, where we believe it can lead to larger performance gains.
Daniel Gedon, Antonio H. Ribeiro, Niklas Wahlström and Thomas B. Schön. First steps towards self-supervised pretraining of the 12-Lead ECG. In Proceedings of the 48th Computing in Cardiology Conference (CinC), Brno, Czech Republic, September 2021.

June 10, 2021 [Paper accepted for the IEEE Control Systems Letters L-CSS] The main contribution of this paper is the formulation of a general control problem where the emphasis is moving from system data to control action. We assume that the system can be modelled by a nonlinear state-space model, but where the model parameters, state and future disturbances are not known and are treated as random variables. Central to our formulation is that the joint distribution of these unknown objects is conditioned on the observed data. Crucially, as new measurements become available, this joint distribution continues to evolve so that control decisions are made accounting for uncertainty as evidenced in the data. The resulting problem is intractable which we obviate by providing approximations that result in finite dimensional deterministic optimisation problems.
Johannes Hendriks, James Holdsworth, Adrian Wills, Thomas B. Schön and Brett Ninness. Data to controller for nonlinear systems: an approximate solution. IEEE Control Systems Letters (L-CSS), 2021. (accepted for publication)
May 4, 2021 [Paper accepted for the IEEE Control Systems magazine] In this paper we offer a contemporary introduction to sequential Monte Carlo (SMC) and in particular its use for nonlinear system identification.
Anna Wigren, Johan Wågberg, Fredrik Lindsten, Adrian Wills and Thomas B. Schön. Nonlinear system identification – Learning while respecting physical models using Sequential Monte Carlo. IEEE Control Systems Magazine, 2021. (accepted for publication)
April 29, 2021 [Join our team - up to three postdoc positions on fundamental ML] You will enter a very active team within AI/ML. Basic research in Machine Learning - models and methods. More information (including instructions on how to apply) is available here.
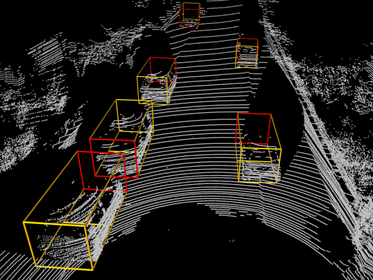
April 16, 2021 [Paper for the CVPR Workshop on autonomous driving] Accurate 3D object detection (3DOD) is crucial for safe navigation of complex environments by autonomous robots. We address this challenging problem by exploring recent advances in conditional energy-based models (EBMs) for probabilistic regression. We design a differentiable pooling operator for 3D bounding boxes, serving as the core module of our EBM network.
Fredrik K. Gustafsson, Martin Danelljan and Thomas B. Schön. Accurate 3D object detection using energy-based models. In the Workshop on Autonomous Driving (WAD) at the Conference on Computer Vision and Pattern Recognition (CVPR), Online, 2021. [arXiv]
April 4, 2021 [6 Papers for SYSID] Quite a few new results to be presented at SYSID this summer, dominated by deep learning approaches for system identification problems, but there are also a few results on more classical topics in the area, like Hammerstein systems.
Antonio H. Ribeiro, Johannes Hendriks, Adrian Wills and Thomas B. Schön. Beyond Occam’s razor in system identification: double-descent when modeling dynamics. In Proceedings of the 19th IFAC Symposium on System Identification (SYSID), Online, July, 2021. [arXiv]
Carl Andersson, Niklas Wahlström and Thomas B. Schön. Learning deep autoregressive models for hierarchical data. In Proceedings of the 19th IFAC Symposium on System Identification (SYSID), Online, July, 2021.
Mina Ferizbegovic, Per Mattsson, Thomas B. Schön and Håkan Hjalmarsson. Bayes control of Hammerstein systems. In Proceedings of the 19th IFAC Symposium on System Identification (SYSID), Online, July, 2021.
Jarrad Courts, Johannes Hendriks, Adrian Wills, Thomas B. Schön and Brett Ninness. Variational state and parameter estimation. In Proceedings of the 19th IFAC Symposium on System Identification (SYSID), Online, July, 2021. [arXiv]
Johannes Hendriks, Fredrik K. Gustafsson, Antonio H. Ribeiro, Adrian Wills and Thomas B. Schön. Deep energy-based NARX models. In Proceedings of the 19th IFAC Symposium on System Identification (SYSID), Online, July, 2021. [arXiv]
Daniel Gedon, Niklas Wahlström, Thomas B. Schön and Lennart Ljung. Deep state space models for nonlinear system identification. In Proceedings of the 19th IFAC Symposium on System Identification (SYSID), Online, July, 2021. [arXiv]

March 4, 2021 [First paper in biology] This is the result of several years of work in a truly cross-disciplinaty team with researchers from biology, machine learning and programming languages performed within our SSF project ASSEMBLE. We consider the problem of statistical phylogenetic analysis. We show that universal probabilistic programming languages (PPLs) solve the expressivity problem, while still supporting automated generation of efficient inference algorithms. We have developed automated generation of sequential Monte Carlo (SMC) algorithms for PPL descriptions of arbitrary biological diversification (birth-death) models. SMC is a new inference strategy for these problems. Finally, applying these algorithms to 40 bird phylogenies, we show that models with slowing diversification, constant turnover and many small shifts generally explain the data best. Our work opens up several related problem domains to PPL approaches, and shows that few hurdles remain before these techniques can be effectively applied to the full range of phylogenetic models.
Fredrik Ronquist, Jan Kudlicka, Viktor Senderov, Johannes Borgström, Nicolas Lartillot, Daniel Lundén, Lawrence Murray, Thomas B. Schön and David Broman. Probabilistic programming: a powerful new approach to statistical phylogenetics. Communications Biology, 4, 244, 2021. [nature]
March 1, 2021 [Antonio Ribeiro joins the team as a pos-doc!] I am very glad to welcome Antonio Ribeiro to our team as a post-doc working on basic research in machine learning and applications in cardiology.

January 30, 2021 [Results on how neural networks deals with aliasing] The question we aim to answer in this paper is simply: "how and to what extent do convolutional neural network (CNNs) counteract aliasing?" We explore the question by means of two examples: In the first, we assess the CNNs capability of distinguishing oscillations at the input, showing that the redundancies in the intermediate channels play an important role in succeeding at the task; In the second, we show that an image classifier CNN while, in principle, capable of implementing anti-aliasing filters, does not prevent aliasing from taking place in the intermediate layers.
Antonio H. Ribeiro and Thomas B. Schön. How convolutional neural networks deal with aliasing. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Online, June, 2021. [arXiv]

February 16, 2021 [New PhD thesis] On March 25 Jan Kudlicka will defend his PhD thesis entitled Probabilistic programming for birth-death models of evolution. It is available for download here. The opponent is Professor Bret Larget (Professor of Botany and Statistics at the University of Wisconsin-Madison) and the grading committee consists of Dr Jana de Wiljes (Institute for Mathematics, University of Potsdam, Germany), Dr Brooks Paige (AI Centre, University College London, UK), and Dr Daniele Silvestro (Department of Biology, University of Freiburg, Germany). Main supervisor is Dr Johannes Borgström and co-supervisors are Dr Lawrence Murray (Uber AI) and myself.
Here at Uppsala university we have an initiative on AI 4 research which is a five-year project tasked with strengthening, renewing and developing research in AI and machine learning and in particular its use as a tool within research. Jan’s research has served as a "proof of concept" for this project showing what can be done on the intersection of AI and biology (specifically phylogenetics).
2020
December 15, 2020 [New stochastic optimization results accepted for Automatica] This is a problem I have worked on since 2003 (low intensity recently, but the problem is still highly fascinating and more relevant than ever). The problem is how to compute estimates of parameters in models of nonlinear dynamics based on measured data using maximum likelihood. The key challenge is that in using particle filters to compute an estimate of the likelihood the resulting optimization problem is a non-convex stochastic optimization problem. To tackle this we have now developed a new quasi-Newton algorithm for use in stochastic optimisation. Quasi-Newton methods have had an enormous impact on deterministic optimisation problems because they afford rapid convergence and computationally attractive algorithms. In essence, this is achieved by learning the second-order (Hessian) information based on observing first-order gradients. We extend these ideas to the stochastic setting by employing a highly flexible model for the Hessian and infer its value based on observing noisy gradients.
Adrian Wills and Thomas B. Schön. Stochastic quasi-Newton with line-search regularization. Automatica, 2021 (Accepted). [arXiv]
October 29, 2020 [Join our team - two postdoc positions on fundamental ML] You will enter a very active team within AI/ML. Basic research in Machine Learning - models and methods. More information (including instructions on how to apply) is available here (English) and here (Swedish).

October 22, 2020 [Paper accepted for the IEEE Trans. on Visualization and computer graphics] This line of work started more than six years ago and it is a combination of skills in Monte Carlo approximations and computer graphics. Evaluating the transmittance between two points along a ray is a key component in solving the light transport through so-called heterogeneous participating media such as for example smoke or fog. We introduce a new class of unbiased transmittance estimators based on random sampling or truncation of a Taylor expansion of the exponential function. We present several versions of the new class of estimators, based on either importance sampling or Russian roulette to provide finite unbiased estimators of the infinite Taylor series expansion.
Daniel Jönsson, Joel Kronander, Jonas Unger, Thomas B. Schön and Magnus Wrenninge. Direct transmittance estimation in heterogeneous participating media using approximated Taylor expansions. IEEE Transactions on Visualization and Computer Graphics, 2020 (Accepted).

October 2, 2020 [AI4Research inaugurated] AI4Reseach is now up an running. It is a university-wide project on AI located at new facilities at our university library Carolina Rediviva. More information is available from the project website (here) and a recording of the inauguration (in Swedish) is available here.
August 5, 2020 [Savage award to Christian Naesseth!!] Christian Naesseth (supervised by Fredrik Lindsten and myself) has been awarded the Savage award within the Theory and Methods category for his PhD thesis.

July 30, 2020 [Second paper on deep regression accepted for BMVC] This is a continuation of our work on better models and algorithms for deep learning when applied to regression problems. We continue making use of the energy-based models (EBMs), which are currently achieving state-of-the-art performance on object detection and visual tracking. Training EBMs is however known to be challenging. How EBMs should be trained for best possible regression performance is thus currently unclear. In this paper we provide the first detailed study of this problem. We also propose a simple yet highly effective extension of noise contrastive estimation, and carefully compare its performance to six popular methods from literature on the tasks of 1D regression and object detection. The results of this comparison suggest that our training method should be considered the go-to approach. We also apply our method to the visual tracking task, setting a new state-of-the-art on five datasets. This work is accepted for BMVC 2020.
Fredrik K. Gustafsson, Martin Danelljan, Radu Timofte, Thomas B. Schön. How to train your energy-based model for regression. In Proceedings of the 31st British Machine Vision Conference (BMVC), Online, September, 2020. [arXiv] [code]

July 5, 2020 [New research on deep regression accepted for ECCV] We are working on the developing better models and algorithms for deep learning when applied to regression problems. We derive a general and conceptually simple regression method with a clear probabilistic interpretation. We create an energy-based model of the conditional target density p(y|x), using a deep neural network to predict the un-normalized density from (x,y). This model of p(y|x) is trained by directly minimizing the associated negative log-likelihood, approximated using Monte Carlo sampling. We perform comprehensive experiments on four computer vision regression tasks. Our approach outperforms direct regression, as well as other probabilistic and confidence-based methods. We obtain good results in practice and set a new state-of-the-art on visual tracking when applied for bounding box estimation. In contrast to confidence-based methods, our approach is also shown to be directly applicable to more general tasks such as age and head-pose estimation. This work is accepted for ECCV 2020.
Fredrik K. Gustafsson, Martin Danelljan, Goutam Bhat, Thomas B. Schön. Energy-based models for deep probabilistic regression. In Proceedings of the European Conference on Computer Vision (ECCV), Online, August, 2020. [arXiv] [code]
May 4, 2020 [New press release] Our recent work on the use of deep learning for automatic interpretation of ECG recordings is featured in a press release from the university today. Click here for the press release and here for the paper (open access).
March 5, 2020 [Papers accepted for L4DC and IFAC world congress] New results on robust data-driven learning of controllers, the use of deep learning for system identification and finally a new quasi-Newton type algorithm for large-scale stochastic optimisation.
Jack Umenberger and Thomas B. Schön. Optimistic robust linear quadratic dual control. In Proceeding of Learning for dynamics and control (L4DC), Berkeley, CA, USA, June, 2020. (Oral presentation) [arXiv]
Lennart Ljung, Carl Andersson, Koen Tiels, and Thomas B. Schön. Deep learning and system identfication. In Proceedings of the IFAC World Congress, Berlin, Germany, July, 2020.
Adrian Wills and Thomas B. Schön and Carl Jidling. A fast quasi-Newton-type method for large-scale stochastic optimisation. In Proceedings of the IFAC World Congress, Berlin, Germany, July, 2020. [arXiv]
February 24, 2020 [Join our team - three PhD student positions are now open] You will enter a very active team within AI/ML. We have outlined three concrete examples of possible projects, but we take a broad interest in the area and other thesis topics are also possible. The projects falls within the areas of 1. Causality (WASP project), 2. Reinforcement learning and 3. Deep dynamical models. More information (including instructions on how to apply) is available here (English) and here (Swedish).
February 21, 2020 [Papers accepted for Hypertension and ICASSP] Our editorial on the use of machine learning in predicting risks has been accepted for publication in Hypertension. We also have new results where we make use of the variance reduction properties of rejection control within particle filters. This has been accepted for ICASSP.
Johan Sundström and Thomas B. Schön. Machine Learning in risk prediction. Hypertension. 2020. (accepted)
Jan Kudlicka, Lawrence M. Murray, Thomas B. Schön and Fredrik Lindsten. Particle filter with rejection control and unbiased estimator of the marginal likelihood. In Proceedings of the 45th International Conference on Acoustics, Speech, and Signal Processing (ICASSP), Barcelona, May, 2020. [arXiv]
January 14, 2020 [Paper accepted for Nature Communications!] We have now been working on using Machine Learning/AI to solve problems in cardiology for a while. I am very happy to announce that some of our first results have now been accepted for publication in Nature Communications! We present a Deep Neural Network (DNN) model for predicting electrocardiogram (ECG) abnormalities in short-duration 12-lead ECG recordings. We trained (end-to-end) a residual neural network to map ECG signals with a duration of 7 to 10 seconds into 6 different classes of ECG abnormalities. We compare the performance with cardiology and emergency resident medical doctors as well as medical students and, considering the F1 score, our model matches or outperforms the medical residents and students for all abnormalities. These results indicate that end-to-end automatic ECG analysis based on DNNs, previously used only in a single-lead setup, generalizes well to the 12-lead ECG. This is an important result in that it takes this technology much closer to standard clinical practice. The project is also described from a popular scientific viewpoint in this video (in Swedish).
Antônio H. Ribeiro, Manoel H. Ribeiro, Gabriela M.M. Paixão, Derick M. Oliveira, Paulo R. Gomes, Jéssica A. Canazart, Milton P. S. Ferreira, Carl R. Andersson, Peter W. Macfarlane, Wagner Meira Jr., Thomas B. Schön, Antonio Luiz P. Ribeiro. Automatic diagnosis of the short-duration 12-lead ECG using a deep neural network: the CODE study. Nature Communications, 2020. [arXiv] (accepted)

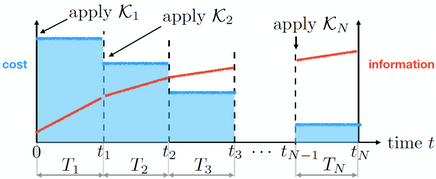
January 7, 2020 [Paper accepted for AISTATS] The exploding and vanishing gradient problem has been the major conceptual principle to drive the development and to motivate changes in the RNN architectures during the last decade. We argue that this principle, while powerful, might need some refinement in order to explain recent developments. We refine the concept of exploding gradients by reformulating the problem in terms of the cost function's smoothness, which gives insight into higher order derivatives and the existence of regions with many close local minima. On the other hand, we clarify the distinction between vanishing gradients and the need for the RNN to learn attractors in order to fully use its expressive power.
Antônio H. Ribeiro, Koen Tiels, Luis A. Aguirre and Thomas B. Schön. Attractors and smoothness: tools for the analysis of recurrent neural network training. In: The 23rd International Conference on Artificial Intelligence and Statistics (AISTATS), Palermo, Italy, June, 2020. [arXiv]
December 16, 2019 [Join our team via a well-funded tenure Professorship in AI/ML] The topic of this position is large scale optimization. You will enter a very active team within AI/ML. This research intensive position is funded by the Wallenberg AI, Autonomous Systems and Software Program (WASP). The funding is generous and comes with 1 PhD student, 4 postdoc years and money for traveling etc. Feel free to help spreading the word to anyone who might be interested. More information about the position and instructions on how to apply are available here. LinkedIn post is available here.
November 5, 2019 [New Licentiate thesis!!] On December 4, 2019 Carl Andersson will present his licentiate thesis entitled: Deep learning applied to system identification: A probabilistic perspective. The discussion leader is Professor Lennart Svensson from from Chalmers (Göteborg, Sweden). Welcome!!
October 4, 2019 [Update: People in an out of the team] In August Christian Naesseth moved to New York to start his post-doc in David Blei's Machine Learning group at Columbia University. Jack Umenberger is moving to a post-doc position at MIT in the robotics group of Russ Tedrake. Jalil Taghia recently started as a Machine Learning researcher with Ericsson Research in Stockholm. Juozas Vaicenavičius has moved back to Vilnius, Lithuania where he continues the line of work that he started within his industrial post-doc (jointly with Veoneer) by setting up his own start-up Sensmetry. Daniel Gedon (previously at the Delft University of Technology, The Netherlands) just started as a PhD student with the WASP-AI project I have together with David Broman at KTH. Filip de Roos (PhD student in Philipp Hennig's Machine Learning group at the University of Tübingen) just started his pre-doc with us on the topic of probabilistic linear algebra.
This is exactly what we want to happen in the team; people from interesting backgrounds grows with us and then they venture on to new exciting positions all around the world. Christian, Jack, Jalil, and Juozas, best of luck in your new positions! Daniel and Filip, welcome to the team!
September 25, 2019 [New Licentiate thesis!!] On October 18, 2019 Carl Jidling will present his licentiate thesis entitled: Tailoring Gaussian processes for tomographic reconstruction. The thesis is availble here. The discussion leader is James Hensman from PROWLER.io (Cambridge, UK). Welcome!! During his visit James will also give a guest lecture in our new Machine Learning course available here.
September 11, 2019 [New fast algorithm for IMUs accepted for IEEE Signal Processing Letters] Our new algorithm for online, real-time orientation estimation integrates gyroscope data and corrects the resulting orientation estimate for integration drift using accelerometer and magnetometer data. This correction is computed, at each time instance, using a single gradient descent step with fixed step length. This fixed step length results in robustness against model errors. Our new algorithm reduces the computational complexity by approximately 1/3 with respect to the state of the art. It also improves the quality of the resulting estimates, specifically when the orientation corrections are large. The code is of course provided in case you want to try it out.
Manon Kok and Thomas B. Schön. A fast and robust algorithm for orientation estimation using inertial sensors. IEEE Signal Processing Letters, 2019. [IEEE] [code] (accepted)
September 4, 2019 [Spotlight paper at NeurIPS 2019] Our new developments concerning the problem of learning control policies for an unknown linear dynamical system to minimize a quadratic cost function are accepted for NeurIPS 2019 with a spotlight presentation. We present a method, based on convex optimization, that accomplishes this task robustly: i.e., we minimize the worst-case cost, accounting for system uncertainty given the observed data. The method balances exploitation and exploration, exciting the system in such a way so as to reduce uncertainty in the model parameters to which the worst-case cost is most sensitive.
Jack Umenberger, Mina Ferizbegovic, Thomas B. Schön, Håkan Hjalmarsson. Robust exploration in linear quadratic reinforcement learning. In Neural Information Processing Systems (NeurIPS), Vancouver, Canada, December 2019. (spotlight presentation) [arXiv]

August 30, 2019 [SMC course this week] This week we once again gave our PhD level course on SMC methods. This year we had 85 participants, representing 23 different universities/companies. Thank you all for participating!
July 19, 2019 [4 papers accepted for CDC 2019] The use of deep learning for solving sequence learning problems is highly interesting and a very active research topic. We have investigated the use of deep learning for the specific task of nonlinear system identification and it is very clear that deep learning offers interesting possibilities also for this area. This initial paper (we will continue working on this promising topic) is mostly an initial experimental study where we play with this new technology on some benchmark dataset. The second paper propose a new method for Bayesian identification of nonlinear state-space models driven by our new debiasing technique for nonlinear state estimation in nonlinear state space models. The third and fourth papers are jointly published with the IEEE Control Systems Letters and are already reported below.
Carl Andersson, Antonio H. Ribeiro, Koen Tiels, Niklas Wahlström and Thomas B. Schön. Deep convolutional networks are useful in system identification. In Proceedings of the IEEE 58th IEEE Conference on Decision and Control (CDC), Nice, France, December, 2019.
Jack Umenberger, Thomas B. Schön and Fredrik Lindsten. Bayesian identification of state-space models via adaptive thermostats. In Proceedings of the IEEE 58th IEEE Conference on Decision and Control (CDC), Nice, France, December, 2019.
Jack Umenberger and Thomas B. Schön. Nonlinear input design as optimal control of a Hamiltonian system. IEEE Control System Letters, 4(1):85-90, 2020. Jointly published at the 58th IEEE Conference on Decision and Control (CDC), Nice, France, December, 2019. [arXiv] [IEEE]
Mina Ferizbegovic, Jack Umenberger, Håkan Hjalmarsson and Thomas B. Schön. Learning robust LQ-controllers using application oriented exploration. IEEE Control System Letters, 4(1):19-24, 2020. Jointly published at the 58th IEEE Conference on Decision and Control (CDC), Nice, France, December, 2019. [IEEE]

July 4, 2019 [Second paper on neutron transmission measurements accepted] Our first paper on the topic is available here. The existing algorithms for reconstructing the strain field from energy-resolved neutron transmission measurements all assume that the strain-free lattice spacing d0 is a known constant limiting their application. We consider the more general problem of jointly reconstructing the strain- and the d0-fields. By utilizing recent developments in Machine Learning we have developed a method for solving this inherently nonlinear problem. Our solution also ensures that the estimated strain field satisfies the equilibrium conditions imposed by physics.
[J46] Johannes N. Hendriks, Carl Jidling, Thomas B. Schön, Adrian Wills, Christpher M. Wensrich and Erich H. Kisi. Neutron Transmission Strain Tomography for Non-Constant Strain-Free Lattice Spacing. Nuclear instruments and methods in physics research section B, 2019. (accepted) [arXiv]

June 28, 2019 [Paper accepted for Inverse Problems] This is our first (but certainly not last) work on x-ray computed tomography (CT) imaging, which is a non-invasive method to recover the internal structure of an object by collecting projection data from multiple angles. We use a Gaussian process prior to model the target function and estimate its (hyper)parameters from measured data (when we only have limited data available). In contrast to established methods, this comes with the advantage of not requiring any manual parameter tuning, which usually arises in classical regularization strategies. Our approach allows for reformulation of come classical regularization methods as Laplacian and Tikhonov regularization as Gaussian process regression, and hence provides an efficient algorithm and principled means for their parameter tuning.
Zenith Purisha, Carl Jidling, Niklas Wahlström, Thomas B. Schön and Simo Särkkä. Probabilistic approach to limited-data computed tomography reconstruction. 2019. [arXiv]
June 18, 2019 [Paper accepted for IEEE Transactions on Signal Processing] I have been working on Sequential Monte Carlo (SMC) methods since I started my PhD back in December 2001 and this is definitely one of the most interesting developments I have been involved in (so far :-) ) when it comes to SMC. A key challenge is to extend the algorithm to high-dimensional spaces. In this work we take one step in this direction by developing a construction that generalises the SMC framework by requiring only approximate, properly weighted, samples from the SMC proposal distribution, while still resulting in a correct SMC algorithm! This opens the door to completely new (higher dimensional) application areas, such as for example nonlinear spatio-temporal state space models.
Christian A. Naesseth, Fredrik Lindsten and Thomas B. Schön. High-dimensional filtering using nested sequential Monte Carlo. IEEE Transactions on Signal Processing, 2019. (Accepted) [arXiv]

June 4, 2019 [Two papers accepted for L-CSS] In the first paper we propose an input design method for a general class of parametric probabilistic models (including nonlinear dynamical systems). By representing (samples from) the posterior as trajectories from a certain Hamiltonian system, we transform the input design task into an optimal control problem. In the second paper we study the problem of learning robust LQ-controllers, when the dynamics of the linear system are unknown. We develop a robust control synthesis method to minimize the worst-case LQ cost, with probability 1 − δ, given empirical observations of the system. The dual control strategy that we derive gives promising results in comparison with the common greedy random exploration strategies. We can do better than just random exploration.
Jack Umenberger and Thomas B. Schön. Nonlinear input design as optimal control of a Hamiltonian system. IEEE Control System Letters, 2019. [arXiv]
Mina Ferizbegovic, Jack Umenberger, Håkan Hjalmarsson and Thomas B. Schön. Learning robust LQ-controllers using application oriented exploration. IEEE Control System Letters, 2019.
May 15, 2019 [Paper accepted for UAI]
 This is our first paper within the area of phylogenetics and it also links in well in our series of papers making use of our new programming language Birch. More specifically we consider probabilistic programming for birth-death models of evolution and introduce a new widely-applicable inference method that combines an extension of the alive particle filter with automatic Rao-Blackwellization via delayed sampling. Birth-death models of evolution are an important family of phylogenetic models of the diversification processes that lead to evolutionary trees. Probabilistic programming languages give phylogeneticists a new and exciting tool: their models can be implemented as probabilistic programs with just a basic knowledge of programming.
This is our first paper within the area of phylogenetics and it also links in well in our series of papers making use of our new programming language Birch. More specifically we consider probabilistic programming for birth-death models of evolution and introduce a new widely-applicable inference method that combines an extension of the alive particle filter with automatic Rao-Blackwellization via delayed sampling. Birth-death models of evolution are an important family of phylogenetic models of the diversification processes that lead to evolutionary trees. Probabilistic programming languages give phylogeneticists a new and exciting tool: their models can be implemented as probabilistic programs with just a basic knowledge of programming.
Jan Kudlicka, Lawrence M. Murray, Fredrik Ronquist and Thomas B. Schön. Probabilistic programming for birth-death models of evolution using an alive particle filter with delayed sampling. In Conference on Uncertainty in Artificial Intelligence (UAI), Tel Aviv, Israel, July, 2019. [pdf]

April 25, 2019 [Paper accepted for IEEE Access] The question we are interested in within this line of work is: “Is a model class consistent with the available data?”. We explore the simple idea of simulating data from the model and compare that (in terms of the likelihoods) to the available data. The end result is a very general (but computer intensive) approach!
Andreas Lindholm, Dave Zachariah, Petre Stoica, and Thomas B. Schön. Data consistency approach to model validation. IEEE Access, 2019. (Accepted) [arXiv] [code]

April 22, 2019 [Paper accepted for ICML!] We are entering the field of causal inference and in June we will present our initial results at ICML. We investigate the problem of inferring the causal effect of an exposure on an outcome across space, using observational data. The data is possibly subject to unmeasured confounding variables which, in a standard approach, must be adjusted for by estimating a nuisance function. Here we develop a method that eliminates the nuisance function, while mitigating the resulting errors-in-variables. The result is a robust and accurate inference method for spatially varying heterogeneous causal effects.
Muhammad Osama, Dave Zachariah and Thomas B. Schön. Inferring heterogeneous causal effects in presence of spatial confounding. In Proceedings of the 36th International Conference on Machine Learning (ICML), Long Beach, CA, USA, June, 2019. [arXiv]

March 22, 2019 [PhD course on Sequential Monte Carlo (SMC) methods] We will once again offer our PhD course on Sequential Monte Carlo (SMC) methods. The course is given as an intensive course during one week (August 26-29, 2019). Full information about the course is available here. Registration is now open! Last time gave the course (see picture to the left) there were roughly 80 participants from 35 different universities/companies from all around the world.
We recently wrote a piece on how SMC can be leveraged in solving Machine Learning problems. We foresee a very interesting future here. A draft paper is available here.
Welcome to the course!!
February 8, 2019 [New PhD course in Deep Learning!] We will offer a PhD course in Deep Learning, starting next month. For more information, click here.
January 29, 2019 [Looking for a new PhD student in Machine Learning] I am looking for a new PhD student to join our Machine Learning team. The topic for the PhD is Deep Learning. There are quite a few of us working on Deep Learning these days so you will enter a very active research group. This position is funded by the WASP (Wallenberg AI, Autonomous Systems and Software) project. Link to advertiment (English), Link to advertiment (Swedish) and a link to the WASP project.

December 27, 2018 [Two papers accepted for AISTATS!] We will present new results at the 22nd International Conference on Artificial Intelligence and Statistics (AISTATS) in Naha (Japan) in April, 2019. The first paper presents a multiresolution Gaussian process (GP) model which assumes conditional independence among GPs across resolutions. The model is built on the hierarchical application of predictive processes using a particular representation of the GP via the Karhunen-Loeve expansion with a Bingham prior model. In the second paper we study model calibration in classification. A probabilistic classifier is said to be calibrated if the probability distributions that it outputs are consistent with the empirical frequencies observed in the measured data. We develop a rather general theoretical calibration evaluation framework for classification. We illustrate its use on standard deep learning classifiers.
Jalil Taghia and Thomas B. Schön. Conditionally independent multiresolution Gaussian processes. In Proceedings of the 22nd International Conference on Artificial Intelligence and Statistics (AISTATS), Naha, Japan, April, 2019. (Oral presentation) [arXiv]
Juozas Vaicenavičius, David Widmann, Carl Andersson, Fredrik Lindsten, Jacob Roll and Thomas B. Schön. Evaluating model calibration in classification. In Proceedings of the 22nd International Conference on Artificial Intelligence and Statistics (AISTATS), Naha, Japan, April, 2019. [arXiv]
December 21, 2018 [Postdoc opening within new Sydney/Uppsala Machine Learning/Control project] Together with Ian Manchester at The University of Sydney we are looking for a postdoc for our new Machine Learning/Control project funded by the Australian Research Council. The position is based in Sydney, but time will also be spent in our team at Uppsala University. More information is available here.
December 5, 2018 [Paper accepted for Automatica] As a follow-up on our previous paper on some of the fundamantal properties of Linear Quadratic Gaussian (LGQ) control we have now established attitional results related to the discounted-cost case. The situation is different in this case in that the cost function has an exponential discount factor, also known as a prescribed degree of stability. In this case, the optimal control strategy is only available when the state is fully known. Our new results extends this result by deriving an optimal control strategy when working with an estimated state. Expressions for the resulting optimal expected cost are also given.
Hildo Bijl and Thomas B. Schön. Optimal controller/observer gains of discounted-cost LQG systems. Automatica, 2019. [pdf] [arXiv]
November 26, 2018 [Two spotlight presentations at NeurIPS next week!] Our team will give two spotlight presentations at the Conference on Neural Information Processing Systems (NeurIPS) in Montréal (Canada) next week:
Jack Umenberger and Thomas B. Schön. Learning convex bounds for linear quadratic control policy synthesis. In Neural Information Processing Systems (NeurIPS), Montréal, Canada, December 2018. [arXiv] [NeurIPS] [poster] [video]
Fredrik Lindsten, Jouni Helske and Matti Vihola. Graphical model inference: Sequential Monte Carlo meets deterministic approximations. In Neural Information Processing Systems (NeurIPS), Montréal, Canada, December 2018. [NeurIPS]
November 20, 2018 [Paper accepted for the Machine Learning for Health Workshop at NeurIPS] We have shown that it is possible to achieve human level performance when it comes to ECG evaluation:
Antonio H. Ribeiro, Manoel Horta, Gabriela Paixao, Derick Oliveira, Paulo R. Gomes, Jessica A. Canazart, Milton Pifano, Wagner Meira Jr., Thomas B. Schön and Antonio Luiz Ribeiro. Automatic diagnosis of short-duration 12-lead ECG using a deep convolutional network. In ML4H: Machine Learning for Health Workshop at NeurIPS, Montréal, Canada, December 2018. [arXiv]
November 9, 2018 [New PhD thesis to be defended] On December 14 at 10.15 Christian Naesseth will present and defend his PhD thesis. The title of the thesis is: Machine learning using approximate inference - Variational and sequential Monte Carlo methods. The thesis is available here. The opponent is Reader Ian Murray (University of Edinburgh) and the grading committee consists of Docent Jimmy Olsson (KTH). Docent Jose Peña (Linköping University) and Associate professor Morten Mørup (Technical University of Denmark).
October 30, 2018 [New pre-doc] I am very glad that we have Johannes Hendriks from The University of Newcastle (Australia) doing his pre-doc vith us during the period November 2018 - February 2019. We will be working on some fundamentals of the Gaussian process and in particular its application to tomographic reconstruction. For the latter we will continue the line of work we started here.
[Looking for new PhD students in Machine Learning] We (Dave Zachariah and I) are looking for new PhD students working in Machine Learning on the topics of Causality and deep probabilistic programming. The latter will take place within the WASP project and it is a joint project together with David Broman and his team at KTH. The advertisment is available here.
October 4, 2018 [Vision paper describing Birch accepted] This paper offers a broad perspective on probabilistic modeling and inference in light of recent advances in probabilistic programming, in which models are formally expressed in Turing-complete programming languages. We try to show how probabilistic programming languages can help to automate this workflow, especially in the matching of models with inference methods. The ideas are illustrated with a new probabilistic programming language called Birch.
Lawrence Murray and Thomas B. Schön. Automated learning with a probabilistic programming language: Birch. Annual Reviews in Control, 2018. (Accepted for publication) [arXiv]
September 12, 2018 [New team members!] I am very glad to welcome two new PhD students to our team, Fredrik Gustafsson and Niklas Gunnarsson (WASP industrial PhD student together with Elekta). We also have a visiting PhD student Antônio Ribeiro from Universidade Federal de Minas Gerais (UFMG) in Belo Horizonte, Brazil. Antônio will visit us for one year and we will be working on the intersection of machine learning and control, especially with connections to optimization.

September 5, 2018 [Paper accepted for NIPS] This work deals with decision making for dynamical systems in the presence of uncertainty. More specifically, the problem we address lies at the intersection of reinforcement learning and robust control, and can be summarized as follows: given observations from an unknown dynamical system, we seek a policy to optimize the expected cost (as in reinforcement learning), subject to certain robust stability guarantees (as in robust control).
We have for a long time been developing algorithms to learn probabilistic models of dynamical systems from measured data. This is the first work where we are trying to make use of these models to build controllers with stability guarantees. The recent series of blog posts (nicely summarized in this paper) of Ben Recht was a great source of inspiration for our work.
[C106] Jack Umenberger and Thomas B. Schön. Learning convex bounds for linear quadratic control policy synthesis. In Neural Information Processing Systems (NIPS), Montréal, Canada, December 2018. [arXiv]
September 3, 2018 [New PhD thesis to be defended] On October 12 at 10.15 Andreas Svensson will present and defend his PhD thesis in room ITC/2446 here at Uppsala University. The title of the thesis is: Machine learning with state-space models, Gaussian processes and Monte Carlo methods. The thesis is available here. The opponent is Professor Carl Rasmussen from the University of Cambridge and the grading committee consists of Docent Tatjana Pavlenko (KTH), Docent Carl Henrik Ek, (University of Bristol) and Professor Kaj Nyström (Uppsala University). Welcome!

September 1, 2018 [Paper accepted for Nuclear inst. and methods in physics research section B] In this paper we present our new results on modelling and reconstruction of strain fields, relying upon data generated from neutron Bragg-edge measurements. This is an application of our Gaussian process construction from NIPS 2017 that correctly accounts for known linear constraints. More specifically the strain field is modelled as a Gaussian process, assigned a covariance structure customised by incorporation of the so-called equilibrium constraints. The results indicate a high potential and we hope that this will inspire the concept of probabilistic modelling to be used within other tomographic applications as well.
Carl Jidling, Johannes Hendriks, Niklas Wahlström, Alexander Gregg, Thomas B. Schön, Chris Wensrich and Adrian Wills. Probabilistic modelling and reconstruction of strain. Nuclear instruments and methods in physics research section B, 2018. [arXiv]
July 4, 2018 [Paper accepted for JASA] We have introduced a new coupling construction for particle filters which we also exploit to derive a new unbiased estimator of smoothing expectations. The lack-of-bias property has methodological benets in that independent estimators can be generated in parallel and condence intervals can be constructed from the central limit theorem. To design unbiased estimators, we combine a generic debiasing technique for Markov chains and a Markov chain Monte Carlo algorithm for smoothing.
Pierre E. Jacob, Fredrik Lindsten and Thomas B. Schön. Smoothing with couplings of conditional particle filters. Journal of the American Statistical Society (JASA), 2018. [arXiv]
June 7, 2018 [New Automatica paper] We revisit the classical problem of maximum likelihood learning of linear time-invariant state space models. Our contribution is that we add model stability guarantees by combining Lagrangian relaxation with the expectation maximization (EM) algorithm to build tight bounds on the likelihood. We then derive two algorithms that can be used to optimize these bounds over convex parameterizations of all stable linear models using semidefinite programming.
[J34] Jack Umenberger, Johan Wågberg, Ian Manchester and Thomas B. Schön. Maximum likelihood identification of stable linear dynamical systems. Automatica, 2018. (Accepted for publication) [arXiv] [code]
June 1, 2018 [2 guest PhD students] Over the coming month I am very glad to welcome our two guest PhD students Timothy Rogers from the University of Sheffield in the UK and Matteo Scandella from the University of Bergamo in Italy. Both will be working on sequential Monte Carlo and Birch.

May 11, 2018 [Paper accepted for ICML] We provide new results for the problem of predicting spatio-temporal processes with temporal patterns that vary across spatial regions, when data is obtained as a stream. More specifically, we develop a localized spatio-temporal covariance model of the process that can capture spatially varying temporal periodicities in the data. We then apply a covariance-fitting methodology to learn the model parameters which yields a predictor that can be updated sequentially with each new data point.
[C105] Muhammad Osama, Dave Zachariah and Thomas B. Schön. Learning localized spatio-temporal models from streaming data. In Proceedings of the 35th International Conference on Machine Learning (ICML), Stockholm, Sweden, July, 2018. [arXiv]
April 6, 2018 [Three conference accepted] We three papers accepted for the 18th IFAC Symposium on System Identification (SYSID) held in Stockholm this summer.
[C103] Carl Andersson, Niklas Wahlström and Thomas B. Schön. Data-driven impulse response regularization via deep learning. In Proceedings of the 18th IFAC Symposium on System Identification (SYSID), Stockholm, Sweden, July, 2018. [arXiv]
[C102] Andreas Svensson, Dave Zachariah and Thomas B. Schön. How consistent is my model with the data? Information-theoretic model check. In Proceedings of the 18th IFAC Symposium on System Identification (SYSID), Stockholm, Sweden, July, 2018. [arXiv]
[C101] Andreas Svensson, Fredrik Lindsten and Thomas B. Schön. Learning nonlinear state-space models using smooth particle-filter-based likelihood approximations. In Proceedings of the 18th IFAC Symposium on System Identification (SYSID), Stockholm, Sweden, July, 2018. [arXiv]

March 21, 2018 [First pre-release of our new probabilistic programming language Birch] Within our research project ASSEMBLE (funded by the Swedish Foundation for Strategic Research) we are developing a new probabilistic programming language, which we call Birch. Everyone is welcome to play with it. More information is available here.

March 16, 2018 [Paper accepted for IEEE Transactions on Robotics] By using Maxwell's equations, we derive a probabilistic modeling approach for interpolation and extrapolation of the magnetic field. We model the magnetic field components jointly by imposing a Gaussian process (GP) prior on the latent scalar potential of the magnetic field. By rewriting the GP model in terms of a Hilbert space representation, we circumvent the computational pitfalls associated with GP modeling and provide a computationally efficient and physically justified modeling tool for the ambient magnetic field. The model allows for sequential updating of the estimate and time-dependent changes in the magnetic field and is applied in real-world applications. This is joint work with our friends Arno Solin and Simo Särkkä at Aalto University, Finland.
Arno Solin, Manon Kok, Niklas Wahlström, Thomas B. Schön and Simo Särkkä. Modeling and interpolation of the ambient magnetic field by Gaussian processes. IEEE Transactions on Robotics, 2018. (Accepted for publication) [arXiv] [video]
February 28, 2018 [Looking for new PhD students in Machine Learning to join our team] A short informal overview of some of our research is available here and a link to the advertisment is available here.
February 27, 2018 [Our team is now part of the WASP project] WASP stands for Wallenberg Artificial Intelligence, Autonomous Systems and Software Program. It is Sweden’s largest ever individual research program. More information about the project is available here.
February 27, 2018 [Welcome to 2018 edition of the PhD course in Probabilistic Machine Learning] More information is available from the course website, which is available here.
January 22, 2018 [Paper accepted for ACC 2018] We have developed a decision-theoretic formulation of the parametric system identification problem that bridges the gap between the classical and the more recent regularized approaches. The end result is a regularized method that is robust to small sample-sizes as well as overparameterization.
[C100] Johan Wågberg, Dave Zachariah and Thomas B. Schön. Regularized parametric system identification: a decision-theoretic formulation. In Proceedings of the American Control Conference (ACC), Milwaukee, WI, USA, June, 2018. [arXiv]
January 16, 2018 [NewLEADS in the news] A popular scientific article about our new research environment NewLEADS is available here.
2017
December 22, 2017 [Paper accepted for AISTATS] This is our first paper making use of our new probabilistic programming language (Birch). The contribution is a construction that automatically makes use of Rao-Blackwellization to exploit a conditionally linear Gaussian sub-structure when it is present in the model.
[C99] Lawrence M. Murray, Daniel Lundén, Jan Kudlicka, David Broman and Thomas B. Schön. Delayed sampling and automatic Rao-Blackwellization of probabilistic programs. In Proceedings of the 21st International Conference on Artificial Intelligence and Statistics (AISTATS), Lanzarote, Spain, April, 2018. [arXiv]
October 31, 2017 [New grant from the Swedish Research Council] Our new ideas on how to build flexible models for nonlinear dynamical systems were granted from the Swedish Research Council. More details about the call are available here.
October 23, 2017 [Journal paper accepted for Mechanical Systems and Signal Processing] We are concerned with the problem of learning probabilistic nonlinear state space models of dynamical systems from measured data. In this invited tutorial we provide a self-contained introduction to one of the state-of-the-art methods - the particle Metropolis-Hastings algorithm - which has proven to offer a practical approximation. It is a Monte Carlo based method, where the particle filter is used to guide a Markov chain Monte Carlo method through the parameter space.
Thomas B. Schön, Andreas Svensson, Lawrence Murray and Fredrik Lindsten. Probabilistic learning of nonlinear dynamical systems using sequential Monte Carlo. Mechanical Systems and Signal Processing (MSSP), 2017. [pdf] [arXiv] [code]
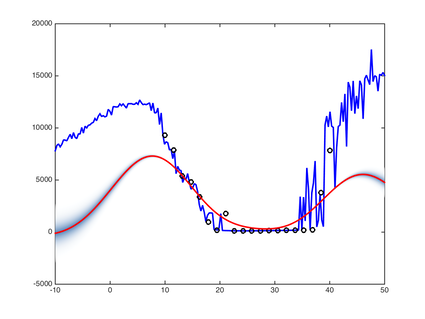
September 25, 2017 [Journal paper accepted for IFAC Journal of Systems and Control] The Gaussian Process has three traditional shortcomings: 1) it is computationally intensive, 2) it cannot effectively deal with stochastic (noisy) inputs and 3) it cannot effectively incorporate new measurements in an online fashion. We have derived an algorithm that handles all three shortcomings. The new results are illustrated by solving nonlinear system identification problems.
Hildo Bijl, Thomas B. Schön, Jan-Willem van Wingerden and Michel Verhaegen. System identification through online sparse Gaussian process regression with input noise. IFAC Journal of Systems and Control, 2017. (Accepted for publication) [pdf] [arXiv] [ScienceDirect]
September 14, 2017 [Teaching the SMC methods course in Brussels] I will teach the SMC methods course in Brussels during the time period October 3 - 6, 2017. More complete information about the August edition of the course is available here.
September 12, 2017 [Journal paper accepted for Mechanical Systems and Signal Processing] A particle filtering based algorithm used to identify a nonlinear dynamical system based on observations that are highly informative (observations where there is very little or no measurement noise present) often ends up in trouble. To counteract this we suggest an algorithm which initially assumes that there is artificial measurement noise present. The variance of this noise is sequentially decreased in an adaptive fashion such that we in the end recover the original problem or possibly a very close approximation of it. Computationally the parameters are learned using a sequential Monte Carlo (SMC) sampler. We illustrate the new algorithm on one of the benchmarks for nonlinear system identification avilable here. More specifically we learn a challenging Wiener-Hammerstein system (described here) arising from an electrical circuit.
Andreas Svensson, Thomas B. Schön and Fredrik Lindsten. Learning of state-space models with highly informative observations: a tempered Sequential Monte Carlo solution. Mechanical Systems and Signal Processing (MSSP), 2017. [arXiv]
September 4, 2017 [Paper accepted for NIPS]
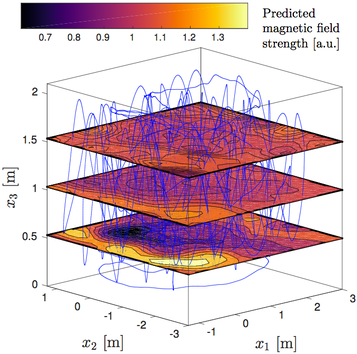 In this work we present a new probabilistic model in the form of a Gaussian process that is guaranteed to fulfill linear operator constraints. These constraints can for example encode fundamental properties of physics. One of the examples involve modelling of the magnetic field, which is known to be curl-free. This basic knowledge is encoded in our model from the start and as we aquire measurements the model is adapted accordingly. This opens up for exciting opportunities, where we can start from basic scientific laws and then fill in with specific knowledge optained from measurements in the particular situation at hand, in such a way that we at all times properly accounts for uncertainty throughout the entire model.
In this work we present a new probabilistic model in the form of a Gaussian process that is guaranteed to fulfill linear operator constraints. These constraints can for example encode fundamental properties of physics. One of the examples involve modelling of the magnetic field, which is known to be curl-free. This basic knowledge is encoded in our model from the start and as we aquire measurements the model is adapted accordingly. This opens up for exciting opportunities, where we can start from basic scientific laws and then fill in with specific knowledge optained from measurements in the particular situation at hand, in such a way that we at all times properly accounts for uncertainty throughout the entire model.
Carl Jidling, Niklas Wahlström, Adrian Wills and Thomas B. Schön. Linearly constrained Gaussian processes. Advances in Neural Information Processing Systems (NIPS), Long Beach, CA, USA, December, 2017. [arXiv]

September 1, 2017 [SMC workshop and PhD course] The Sequential Monte Carlo workshop and the associated PhD course are now over. All the material is available from the course and workshop websites. If you are still interested in the PhD course it is offered once more in October, but that time it is given in Brussels, Belgium. More information will be available here shortly.
August 23, 2017 [SMC PhD course starting tomorrow] Tomorrow we start the intensive PhD course on SMC methods here in Uppsala. There are 85 students registered for the course, from 13 countries representing 35 universities and companies. More information about the course is available here. Directly after the course we are hosting the international conference on SMC at Norrlands Nation here in Uppsala with roughly 100 participants, more information about this event is available here.
August 3, 2017 [Paper accepted for Foundations and Trends in Signal Processing] We have been working with inertial sensors (accelerometers and gyroscopes) for well over a decade now. Over the past years we have made a significant effort to documents what we have learnt when it comes to the signal processing that is necessary in order to bring useful information out of the raw measurements of acceleration and angular velocity. I am very glad to announce that these end result of all this work is now accepted for publication in Foundations and Trends in Signal Processing. Our aim is to provide a self-contained introduction on how to use these sensors for position and orientation computations among other things.
Manon Kok, Jeroen Hol and Thomas B. Schön. Using inertial sensors for position and orientation estimation. Foundations and Trends in Signal Processing, 2017. (Accepted for publication) [arXiv]
July 12, 2017 [Paper accepted for CDC] We have new results on the construction of probabilistic optimization algorithms (algorithms capable of solving optimization problems when we only have access to noisy versions of the cost function and its derivatives). It has recently been shown that most of the existing quasi-Newton algorithms can be formulated as learning algorithms, capable of learning local models of the cost function. We leverage this fact together with the non-parametric and probabilistic Gaussian process model in solving these stochastic optimization problems. Our new algorithm unites these approximations together with recent probabilistic line search routines to deliver a generally applicable probabilistic quasi-Newton approach.
Adrian G. Wills and Thomas B. Schön. On the construction of probabilistic Newton-type algorithms. In Proceedings of the 56th IEEE Conference on Decision and Control (CDC), Melbourne, Australia, December 2017. [arXiv]
July 5, 2017 [2 new post-docs joining the team] After the summer we have two new post-docs joining us. Juozas Vaicenavičius will be an industrial post-doc working on deep learning for autonomous driving together with our collaborators at Autoliv. Juozas is also affiliated with the center of interdisciplinary mathematics (CIM) here at Uppsala University. Jack Umenberger from the University of Sydney brings in important knowledge on optimization based methods for nonlinear system identification and machine learning and will be working in the ASSEMBLE project.
May 15, 2017 [Best paper award] Christian Naesseth received the best paper award at the 20th International Conference on Artificial Intelligence and Statistics (AISTATS). The award to given for this paper. Congratulations!!
May 8, 2017 [3 new visitors] We have just welcomed three new visitors to the team. Professor Bhushan Gopaluni from the University of British Columbia in Vancouver (Canada) is visiting for two months, Dr Koen Tiels from the Vrije Universiteit Brussel (Belgium) is staying for 2 weeks. Finally, we have Tom Jin visiting from the Department of Statistics at Warwick University in Warwick (UK), where he is a PhD student within OxWaSp. Welcome!!
April 20, 2017 [New post-doc] I am very glad to welcome Jalil Taghia to the team. Jalil is currently a post-doc at Stanford (Department of Psychiatry and Behavioral Sciences), and he will join us on July 1, 2017. He will be working on deep learning, variational inference and sequential Monte Carlo. In terms of applications he will be involved in a project that Fredrik Lindsten has together with Sectra.
April 4, 2017 [Registration for the SMC workshop 2017 and the associated intensive PhD course has now opened!] Sequential Monte Carlo (SMC) methods, also known as particle filters or particle methods, have over the past two decades emerged as very successful tools for computational inference in statistical models, including (but not limited to) nonlinear dynamical systems. The aim of the workshop is to bring together researchers developing and using SMC methods in various scientific fields (both in academia and industry). The list of speakers should make for a very interesting event; hope to see you there!
March 16, 2017 [New online learning method for large/streaming data] We have developed a new online learning method for prediction especially well suited in settings involving large and/or streaming data sets. The predictor is implemented online with a runtime that scales linearly in the number of samples; has a constant memory requirement; avoids local minima problems; and prunes away redundant feature dimensions without relying on restrictive assumptions on the data distribution.
Dave Zachariah, Petre Stoica and Thomas B. Schön. Online learning for distribution-free prediction. Pre-print arXiv:1703.05060. [arXiv]
March 1, 2017 [New results accepted for IFAC World congress 2017] We have some new insights to share on the classic problem of smoothing in linear state space models. More specifically we consider the problem of fixed interval smoothing in linear time-varying Gaussian state space models. Interestingly all existing solutions to this problem impose restrictions on the system matrices in order for them to be applicable. We develop new forward-backward type recursions that are applicable under the mildest assumptions possible.
Li-Hui Geng, Brett Ninness, Adrian G. Wills and Thomas B. Schön. Smoothed state estimation via efficient solution of linear equations. In Proceedings of the 20th World Congress of the International Federation of Automatic Control (IFAC), Toulouse, France, July, 2017.
February 24, 2017 [New research environment will be created] Our research environment “NewLEADS - New Directions in Learning Dynamical Systems" together with researchers at KTH has been granted funding from the Swedish research council. More information is available here.
February 7, 2017 [Looking for 2 PhD students in Machine Learning (Deep Learning)] We are looking for two PhD students in Machine Learning working closely with two of our industrial partners (Autoliv and Sectra). This is an effort to further expand our research in Deep Learning and to extend our collaborations with Autoliv and Sectra. More information is available here (jointly with Autoliv) and here (jointly with Sectra). The formal applications are submitted here.
January 25, 2017 [New paper accepted for AISTATS 2017] The backgound to this paper is that the existing uncertainty estimates for Gaussian processes employing hyperparameters that are learnt from data are actually wrong. The contribution of the paper is that we derive a correct and fundamental lower bound of the mean square error (MSE). Importantly this bound is available as a closed-form expression that is simple and cheap to compute, so whenever you need to compute the uncertainty from a Gaussian process you should use these results. The paper will be presented at the 20th International Conference on Artificial Intelligence and Statistics (AISTATS) held in Fort Lauderdale, FL, USA in April, 2017.
Johan Wågberg, Dave Zachariah, Thomas B. Schön and Petre Stoica. Prediction performance after learning in Gaussian process regression. In Proceedings of the 20th International Conference on Artificial Intelligence and Statistics (AISTATS), Fort Lauderdale, FL, USA, April, 2017.
January 23, 2017: [One finished and two new PhD students] Manon Kok successfully defended her PhD thesis and she is now moving on to the University of Cambridge where she will do her post-doc with Carl Rasmussen in the Machine Learning group. We also have two new PhD students joining the team; Muhammad Osama (starting as soon as his residence permit is grated) and Carl Jidling (starting on February 1). Really look forward to working with you, welcome to the team!
January 10, 2017: [Two updates on the Machine Learning activities in Uppsala] 1. We (Fredrik Lindsten, Andreas Svensson, Niklas Wahlström and myself) will offer a course in statistical Machine Learning designed for fourth year MSc students, starting on Monday next week. More information is available from the course web site. 2. The Machine Learning activities are covered by the arena page which is available here.
2016

December 13, 2016: [New PhD thesis] Next month on Friday January 13 Manon Kok will defend her PhD thesis entitled Probabilistic modeling for sensor fusion with inertial measurements. The thesis is available here. The faculty opponent is Eric Foxlin (founder and builder of InterSense) currently working for fitbit. The thesis committe consists of Professor Fredrik Tufvesson (Lund University), Docent Isaac Skog (KTH), Docent Edith Ngai (Uppsala University) and as fall-back committee member we have Professor Magnus Herberthsson (Linköping University).
December 11, 2016: [New Automatica paper] Our new flexible nonparametric nonlinear state space model has been accepted for publication in Automatica. The model builds upon a basis function expansion and we use a connection to Gaussian processes to develop priors on the coefficients, for tuning the model flexibility and to prevent overfitting to data, akin to a Gaussian process state space model (GP-SSM). The priors can alternatively be seen as a regularization, and helps the model in generalizing the data without sacrificing the richness offered by the basis function expansion. An important part of the contribution is to show that it is possible to do regularization in learning nonlinear dynamical systems.
Andreas Svensson and Thomas B. Schön. A flexible state space model for learning nonlinear dynamical systems. Automatica, 2016. (Accepted for publication) [pdf] [code]
November 21, 2016: [New licentiate thesis] On December 16 Andreas Svensson will present his licentiate thesis entitled "Learning probabilistic models of dynamical phenomena using particle filters” (available here). The discussion leader will be Richard Turner from the Machine Learning group at the University of Cambridge (UK).
October 27, 2016: [Video lecture] My WASP lectures on Machine learning are available here (video) and the slides are available here and here. This is part of a basic PhD course on Autonomous systems.
October 7, 2016: [New researcher] On Tuesday next week Lawrence Murray will join us as a researcher working on the ASSEMBLE project. Lawrence moved from the University of Oxford where he just finished his post-doc together with Arnaud Doucet. Welcome to the team!
September 5, 2016: Our project Machine learning for diagnostic support in radiology together with Sectra was granted by Vinnova. This allows us to start up a joint industrial post-doc project on this topic.
September 1, 2016: Today we have two new PhD students starting, Anna Wigren and Carl Andersson. They will be working on large scale sequential Monte Carlo and deep learning. I very much look forward to the journey that lies ahead, welcome to the team!!
August 22, 2016: Over the coming month Jack Umenberger is visiting us from Ian Manchester’s group at the University of Sydney for a short pre-doc. Together with Johan Wågberg we will work on designing EM-type algorithms for nonlinear system identification using recent Lagrangian relaxations and new particle smoothing solutions. Some early proof-of-concept work for linear systems is available here.
August 19, 2016: I am very glad to announce that Christian Andersson Naesseth will spend this academic year doing his pre-doc at Professor David Blei’s lab at Columbia University in New York. The work will be focused around the use of variational approximations in machine learning. Christian was awarded a Fulbright grant to finance his pre-doc.
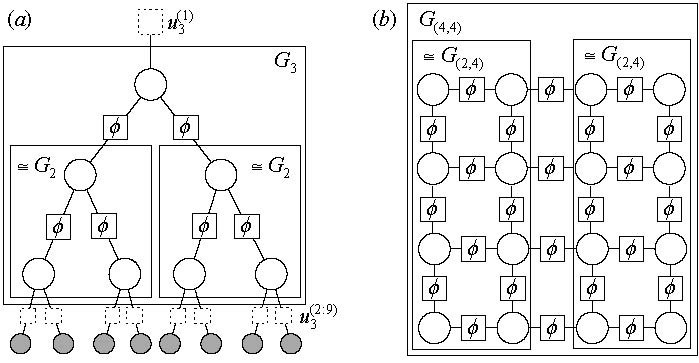
August 18, 2016: We have developed a new class of sequential Monte Carlo (SMC) algorithms that is especially well suited for inference in probabilistic graphical models (including models with loops). By making use of an auxiliary tree-structured decomposition of the model we turn the original problem into a a collection of recursively solved sub-problems. This divide-and-conquer strategy has also given the name Divide-and-Conquer Sequential Monte Carlo (D&C-SMC) to the new class of algorithms. We illustrate the performance on a Markov Random Field (MRF) and on a hierarchical logistic regression problem. This work has now been accepted for publication in the Journal of Computational and Graphical Statistics (JCGS)
Fredrik Lindsten, Adam M. Johansen, Christian A. Naesseth, Bonnie Kirkpatrick, Thomas B. Schön, John Aston and Alexandre Bouchard-Côté. Divide-and-Conquer with Sequential Monte Carlo. Journal of Computational and Graphical Statistics (JCGS), 2016. [arXiv]
July 24, 2016: We have developed a Bayesian input design method for nonlinear state-space models. The key ingredients are Gaussian process optimization and the particle filter. This work will be presented at the 55th IEEE Conference on Decision and Control (CDC) that is held in Las Vegas in December.
Patricio E. Valenzuela, Johan Dahlin, Cristian R. Rojas and Thomas B. Schön. Particle-based Gaussian process optimization for input design in nonlinear dynamical models. In Proceedings of the 55th IEEE Conference on Decision and Control (CDC), December, Las Vegas, December, 2016. (accepted for publication) [arXiv]
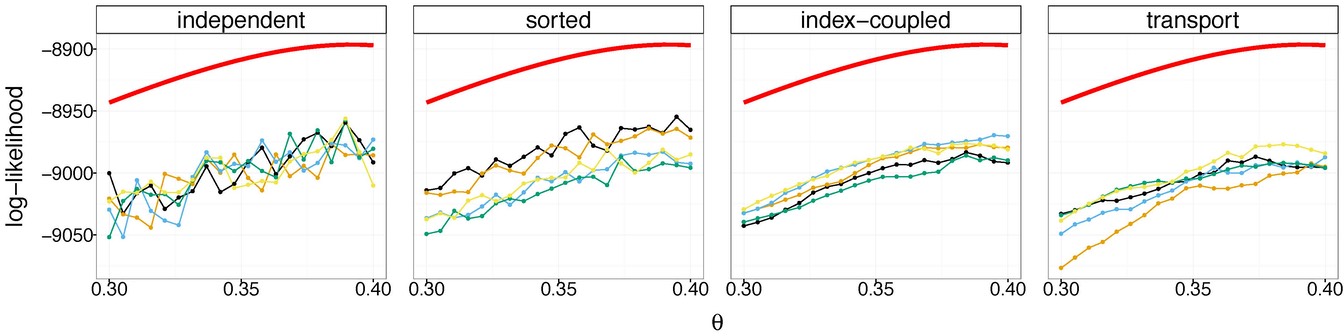
July 5, 2016: Next week Pierre Jacob will present our coupling construction for the particle filter and the conditional particle filter at the World Congress in Probability and Statistics held in Toronto (Canada). All the details on the developments so far are available on arXiv.
July 4, 2016: In September Jeroen Hol (Xsens) will present new developments of our optimization based approach to human body motion caption. Early results in this direction were presented at the 19th IFAC World Congress (Cape Town, South Africa) in August 2014, where it was nominated for the best application paper prize. That paper is available here and an abstract outlining the new developments that will be presented at The 4th European Conference on Computational Optimization (EUCCO) held in Leuven (Belgium) is available here.
June 10, 2016: We (Pierre Jacob, Fredrik Lindsten and myself) have developed a new coupling construction for particle filters and conditional particle filters. The coupled particle filter improves the performance significantly for example when it comes to computing gradients and using it inside the particle Metropolis Hastings algorithm. When the coupled conditional particle filter is combined with a recent debiasing technique we obtain a new smoothing strategy with the appealing properties of 1) straightforward parallelization and 2) the construction of accurate error estimates. Neither of the above is possible with existing particle smoothers. All the details are available in this arXiv:ed paper:
Pierre E. Jacob, Fredrik Lindsten and Thomas B. Schön. Coupling of Particle Filters. Pre-print arXiv, June, 2016. [arXiv]
May 16, 2016: I gave an interview about our new ASSEMBLE project, you can find it here.
May 10, 2016: We have three new papers accepted, where we present new algorithms for the calibration of magnetometers and magnetometers and a scalable and distributed solution to inertial motion capture, respectively.
Manon Kok and Thomas B. Schön. Magnetometer calibration using inertial sensors. IEEE Sensors Journal, 2016.
Manon Kok, Sina Khoshfetrat Pakazad, Thomas B. Schön, Anders Hansson and Jeroen D. Hol. A scalable and distributed solution to the inertial motion capture problem. Submitted to the 19th International conference on information fusion, Heidelberg, Germany, June, 2016. [arXiv]
Fredrik Olsson, Manon Kok, Kjartan Halvorsen and Thomas B. Schön. Accelerometer calibration using sensor fusion with a gyroscope. In Proceedings of the IEEE Workshop on Statistical Signal Processing (SSP), Palma de Mallorca, Spain, June, 2016.
April 12, 2016: Our project ASSEMBLE goes live! We will work on automating machine learning and bringing powerful algorithms (like Sequential Monte Carlo) to the users. The project is funded by The Swedish foundation for strategic research. The partners are David Black-Schaffer (Uppsala university), Joakim Jaldén (KTH) and David Broman (KTH). Link to SSF announcement.

April 7, 2014: I am very glad to welcome Niklas Wahlström as a post-doc in the team! Niklas will work on Deep reinforcement learning and modelling in general.
March 24, 2016: Liang Dai and Johan Dahlin will defend their PhD theses on April 29 and May 4, respectively. Liang’s thesis is entitled Identification using convexification and recursion and it is available here. Johan’s thesis is entitled Accelerating Monte Carlo methods for Bayesian inference in dynamical models and it available here. Professor Magnus Johansson (KTH) will serve as the opponent for Liang’s thesis and the grading committee consists of: Professor Maya Neytcheva (Uppsala University), Docent Martin Enqvist (Linköping University) and Professor Wolfgang Birk (Luleå Technical University). Dr Richard Everitt (University of Reading, UK) and the grading committee consists of: Professor Filip Lindskog (Stockholm University) Dr Paolo Giordani (Sveriges Riksbank) and Dr Johan Karlsson (KTH).
March 18, 2016: The slides for my tutorial on Sunday are available here: Lecture 1, Lecture 2, Lecture 3, Lecture 4. The underlying paper is available here (published at SYSID 2015) and the code implementing the examples is available here. There are also some exercises available here (and data to be used is available here).
January 18, 2016: The 5th edition of the Statistical Machine Learning (SML) course starts tomorrow. The theme of this year’s projects is high-energy particle physics. Some interactions between the fields are available from the dedicated workshops held at NIPS in 2015 (here) and 2014 (here).
Welcome!
January 15, 2016: During the 41st IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP) to be held in Shanghai, China, I will give a 1 day (March 20) tutorial on how to use sequential Monte Carlo (e.g. particle filters) methods to learn models of nonlinear dynamical systems. The title of the tutorial is Learning nonlinear dynamical models using particle filters and a brief abstract is available here. I will make the slides available before the conference. The tutorial is built around this paper,
Thomas B. Schön, Fredrik Lindsten, Johan Dahlin, Johan Wågberg, Christian A. Naesseth, Andreas Svensson and Liang Dai. Sequential Monte Carlo methods for system identification. In Proceedings of the 17th IFAC Symposium on System Identification (SYSID), Beijing, China, October 2015. [pdf] [arXiv] [Code]
Welcome!
2015
December 22, 2015: Our construction of a new Gaussian process state space model enabling Bayesian inference in nonlinear dynamical systems has been accepted for publication at the 19th International Conference on Artificial Intelligence and Statistics (AISTATS) that will be held in Cadiz (Spain) in May, 2016.
Andreas Svensson, Arno Solin, Simo Särkkä and Thomas B. Schön. Computationally efficient Bayesian learning of Gaussian process state space models. In Proceedings of the 19th International Conference on Artificial Intelligence and Statistics (AISTATS), Cadiz, Spain, May, 2016. [arXiv]
December 11, 2015: The Linear Quadratic Gaussian (LQG) controller has been around for a long time and it is a very commonly used controller. Somewhat surprisingly, the statistical properties of the resulting cost function have previously not been fully sorted out. We have derived analytic expressions for the variance (and also the mean) of the LQG cost function. Besides adding to the understanding of the properties of the controller, this also opens up for new controller synthesis. The results have been accepted for Automatica.
Hildo Bijl, Jan-Willem van Wingerden, Thomas B. Schön and Michel Verhaegen. Mean and variance of the LQG cost function. Automatica, 2016.


November 19, 2015: On December 4 two PhD students that I really enjoy working with will defend their theses. The title of Niklas Wahlström’s thesis is Modelling of magnetic fields and extended targets for localisation applications and it is available here and in DiVA. Professor Simon Maskell will act as the opponent. The title of Joel Kronander’s thesis is Physically based rendering of synthetic objects in real environments and it is available here and in DiVA. The opponent for Joel’s thesis will be Greg Ward.
November 6, 2015: We have two workshop papers accepted for the NIPS workshops on Black box learning and inference and Deep reinforcement learning.
Christian A. Naesseth, Fredrik Lindsten and Thomas B. Schön. Towards Automated Sequential Monte Carlo for Probabilistic Graphical Models. In Black box learning and inference workshop at the Conference on Neural Information Processing Systems (NIPS), Montréal, Canada, December 2015.
John-Alexander M. Assael, Niklas Wahlström, Thomas B. Schön and Marc Peter Deisenroth. Data-efficient learning of feedback policies from image pixels using deep dynamical models. In Deep Reinforcement Learning Workshop at the Conference on Neural Information Processing Systems (NIPS), Montréal, Canada, December 2015.
October 26, 2015: I will give my PhD course in Statistical Machine Learning again. The course starts in mid January. For more information about the course, click here. There is no formal registration required, but send me an e-mail is case you are intertested in participating in the course. Welcome!
September 11, 2015: Two new results on how to regularize nonlinear state space models and how to marginalize the hyper-parameters in Gaussian processes have been accepted for publication at the sixth IEEE International Workshop on Computational Advances in Multi-Sensor Adaptive Processing (CAMSAP) that will be held in Cancun, Mexico in December 2015.
Andreas Svensson, Arno Solin, Simo Särkkä and Thomas B. Schön. Nonlinear state space model identification using a regularized basis function expansion. In Proceedings of the IEEE International Workshop on Computational Advances in Multi-Sensor Adaptive Processing (CAMSAP), Cancun, Mexico, December 2015.
Andreas Svensson, Johan Dahlin and Thomas B. Schön. Marginalizing Gaussian process hyperparameters using sequential Monte Carlo methods. In Proceedings of the IEEE International Workshop on Computational Advances in Multi-Sensor Adaptive Processing (CAMSAP), Cancun, Mexico, December 2015. [arXiv]
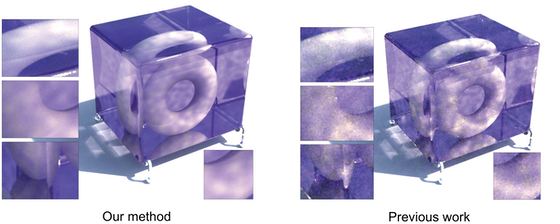
September 8, 2015: Our new sampling strategy to be used within existing MCMC based rendering methods (e.g. MLT and ERPT), for rendering of scenes with heterogenous participating media (such as smoke, clouds and fire) has been accepted for SIGGRAPH Asia 2015 held in Kobe (Japan) in November. Our approach is based on the pseudo-marginal approach developed for Bayesian inference in models with intractable likelihoods. Specifically, it allows us to show that any positive and unbiased estimator of the target distribution can replace the exact quantity to simulate a Markov Chain with a stationary distribution that still has the exact target distribution as a marginal. This results in significantly shorter rendering times (an example is provided in the figure showing equal time renderings).
Joel Kronander, Thomas B. Schön and Jonas Unger. Pseudo-marginal Metropolis light transport. In Proceedings of SIGGRAPH Asia Technical Briefs, Kobe, Japan, November 2015. [pdf]
August 21, 2015: During this week a team consisting of Johan Wågberg, Kjerstin Johansson, Johan Karlsson, Mohammed Al Abassi and myself participated in the Swedish study group Mathematics in Industry at Institute Mittag-Leffler. We worked on solving the problem of energy disaggregation that Greenely is facing, see also this blog post.
July 28, 2015: In 2005 we published a paper on Rao-Blackwellized particle filters (available here). Ten years later our paper sorting out the details concerning Rao-Blackwellized particle smoothing is now accepted for publication. This opens up also for offline inference in conditionally linear Gaussian models. Our construction is such that we marginalize out a conditionally tractable subset of state variables, effectively making use of sequential Monte Carlo only for the intractable (i.e. the nonlinear/non-Gaussian) part of the model.
Fredrik Lindsten, Pete Bunch, Simo Särkkä, Thomas B. Schön and Simon J. Godsill. Rao-Blackwellized particle smoothers for conditionally linear
Gaussian models. IEEE Journal of Selected Topics in Signal Processing, 2015. (Accepted for publication) [arXiv]

June 21, 2015: The slides for tomorrow’s lectures on Nonlinear system identification using sequential Monte Carlo methods are now finished [Lecture 1], [Lecture 2], [Lecture 3], [Lecture 4]. These lectures form a course within the Summer school on foundations and advances in stochastic filtering (FASF 2015) held here in Barcelona, Spain during June 22-25, 2015. It is an updated version of the guest lectures given in Brussels a few weeks back and it is based on this paper.
June 7, 2015: The slides for tomorrow’s lectures on Nonlinear system identification using sequential Monte Carlo methods are now finished [Lecture 1], [Lecture 2], [Lecture 3], [Lecture 4]. These lectures are given in connection with the the Doctoral school on nonlinear system identification held in Brussels, Belgium. They are based on our recent tutorial paper on the topic, available here. In case you find this interesting I will give another edition in Barcelona, Spain on June 22, more information about how to register can be found here.
May 31, 2015: Together with Fredrik Lindsten and Bhushan Gopaluni I am organizing an invited session on the use of Sequential Monte Carlo methods for inference in nonlinear dynamical systems. It was just accepted for the 17th IFAC Symposium on System Identification (SYSID) to be held in Beijing in China, October 2015.
May 31, 2015: We have new research results accepted for the 17th IFAC Symposium on System Identification (SYSID) to be held in Beijing in China, October 2015.
Andreas Svensson, Thomas B. Schön and Manon Kok. Nonlinear state space smoothing using the conditional particle filter. In Proceedings of the 17th IFAC Symposium on System Identification (SYSID), Beijing, China, October 2015. [pdf] [arXiv]
Johan Dahlin, Fredrik Lindsten and Thomas B. Schön, Quasi-Newton particle Metropolis-Hastings applied to intractable likelihood models. In Proceedings of the 17th IFAC Symposium on System Identification (SYSID), Beijing, China, October 2015. [arXiv]
Niklas Wahlström, Thomas B. Schön and Marc Peter Deisenroth. Learning deep dynamical models from image pixels. In Proceedings of the 17th IFAC Symposium on System Identification (SYSID), Beijing, China, October 2015.
Hildo Bijl, Jan-Willem van Wingerden, Thomas B. Schön and Michel Verhaegen. Online sparse Gaussian process regression using FITC and PITC approximations. In Proceedings of the 17th IFAC Symposium on System Identification (SYSID), Beijing, China, October 2015. [pdf]
Jerker Nordh, Torbjörn Wigren, Thomas B. Schön and Bo Bernhardsson. Particle filtering based identification for autonomous nonlinear ODE models. In Proceedings of the 17th IFAC Symposium on System Identification (SYSID), Beijing, China, October 2015. [pdf]
Manon Kok, Johan Dahlin, Thomas B. Schön and Adrian Wills. Newton-based maximum likelihood estimation in nonlinear state space models. In Proceedings of the 17th IFAC Symposium on System Identification (SYSID), Beijing, China, October 2015. [arXiv]
Johan Wågberg, Fredrik Lindsten and Thomas B. Schön. Bayesian nonparametric identification of piecewise affine ARX systems. In Proceedings of the 17th IFAC Symposium on System Identification (SYSID), Beijing, China, October 2015.
Jack Umenberger, Johan Wågberg, Ian R. Manchester and Thomas B. Schön. On identification via EM with latent disturbances and Lagrangian relaxation. In Proceedings of the 17th IFAC Symposium on System Identification (SYSID), Beijing, China, October 2015.
Thomas B. Schön, Fredrik Lindsten, Johan Dahlin, Johan Wågberg, Christian A. Naesseth, Andreas Svensson and Liang Dai. Sequential Monte Carlo methods for system identification. In Proceedings of the 17th IFAC Symposium on System Identification (SYSID), Beijing, China, October 2015.

May 12, 2015: Data-efficient learning in continuous state-action spaces using very high-dimensional observations remains a key challenge in developing fully autonomous systems. In some recent results that was just accepted to the deep learning workshop at ICML this summer we we consider one instance of this challenge, the so-called pixels-to-torques problem, where an agent must learn a closed-loop control policy from pixel information only. We introduce a data-efficient, model-based reinforcement learning algorithm that learns such a closed-loop policy directly from pixel information.
Niklas Wahlström, Thomas B. Schön and Marc Peter Deisenroth. From pixels to torques: policy learning with deep dynamical models. Deep Learning Workshop at the International Conference on Machine Learning (ICML), Lille, France, July 2015. (accepted for publication) [arXiv]
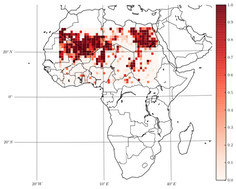
April 27, 2015: Our new sequential Monte Carlo (SMC) construction enabling inference in high(er) dimensional models has been accepted to the International Conference on Machine Learning (ICML), which will be held in Lille (France) in July. The new construction mimics fully adapted proposals for latent spaces and structures in high dimensional models. The key is a nested coupling of multiple SMC samplers and backward simulators.
Christian A. Naesseth, Fredrik Lindsten, Thomas B. Schön. Nested sequential Monte Carlo methods. In Proceedings of the 32nd International Conference on Machine Learning (ICML), Lille, France, July, 2015. (accepted for publication) [pdf] [arXiv]
April 10, 2015: Our tutorial paper Sequential Monte Carlo Methods for System Identification is now available as a pre-print on arXiv. In this paper we describe different approaches (both Bayesian and frequentist) to estimate parameters in general state space models, also know as hidden Markov models. The SMC approach is motivated by its ability to deal with the intractability of nonlinear and non-Gaussian state space models.
March 19, 2015: The cars project has relocated to SciFest for three days (Today - Saturday). Check it out! SciFest is a science festival here in Uppsala, click here to find out more about it.
January 29, 2015: The details concerning the one-day tutorial that I will give on nonlinear system identification using sequential Monte Carlo (SMC) methods are now available. The tutorial is given as a part of the Summer School on Foundations and advances in stochastic filtering, which will be held in Barcelona, June 22-26, 2015.
January 26, 2015: The sequential Monte Carlo (SMC) workshop will be held in Paris in August. More information is available from here, where you can also register.
January 23, 2015: The website for the Uppsala CARS (Camera-based Autonomous Racing System) project is now available here! If you are student here in Uppsala interested in working on this project, let us know since we are currently in the process of assembling a new team. Some ideas for future projects are available here, but own ideas are of course also welcome.
2014
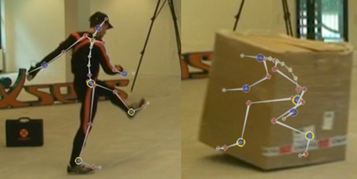
December 29, 2014: Over the last 5 years we have been working on the problem of combining information (sensor fusion) from inertial sensors (accelerometers and gyroscopes) and ultrawideband (some early results are available here and here). Our new work provides a general solution based on a formulation of the problem as an optimization problem. The present application is indoor positioning. This work has now been accepted for publication in the IEEE Transactions on Vehicular technology (special section on Indoor localization, tracking, and mapping with heterogeneous technologies)
Manon Kok, Jeroen D. Hol and Thomas B. Schön. Indoor positioning using ultrawideband and inertial measurements. IEEE Transactions on Vehicular Technology (special section on Indoor localization, tracking, and mapping with heterogeneous technologies), 2015. (accepted for publication) [pdf]
December 27, 2014: Kaczmarz's algorithm is an iterative method for solving linear systems of equations published by the Polish mathematician Stefan Kaczmarz back in 1937, here is an English translation of the original paper (Angenäherte Auflösung von Systemen linearer Gleichungen). We have studied the exponentional convergence of Kaczmarz's algorithm and we provide upper bounds of its convergence rate. The analysis is inspired by proofs of stability for linear time-varying dynamical systems from the control community. The work has been provisionally accepted for publication in the IEEE Signal Processing Letters. There is still room to find tighter upper bounds.
Liang Dai and Thomas B. Schön. On the exponential convergence of the Kaczmarz algorithm. IEEE Signal Processing Letters, 2015.
December 17, 2014: We have been invited to present our optimization-based solution to the human body motion capture problem at the conference on Technically Assisted Rehabilitation (TAR 2015) held in Berlin, Germany in March 2015.
Manon Kok, Jeroen Hol and Thomas B. Schön. An optimization-based approach to human body motion capture using inertial sensors. Conference on Technically Assisted Rehabilitation (TAR), Berlin, Germany, March, 2015. (invited paper). A more complete description of this work is available here.
December 8, 2014: In june next year I will teach a module on nonlinear system identification using sequential Monte Carlo during the Summer school on stochastic filtering to be held in Barcelona, Spain.
November 12, 2014: Manon Kok will do her pre-doc together with Simo Särkkä at Aalto University in Finland during the time period January - March 2015.
September 22, 2014: Our new derivation of recursive direct weight optimization has been accepted for publication in IEEE TAC
Liang Dai and Thomas B. Schön. A new structure exploiting derivation of recursive direct weight optimization. IEEE Transactions on Automatic Control, 2014. (accepted for publication)
September 9, 2014: Our paper on inference in general probabilistic graphical models has been accepted for publication at NIPS 2014. Our method is consistent and it provides unbiased estimates of the partition function. I gave a seminar on the idea at the Isaac Newton Institute for Mathematical Sciences in Cambridge earlier this year, the talk is available here.
Christian A. Naesseth, Fredrik Lindsten and Thomas B. Schön. Sequential Monte Carlo methods for graphical models. Advances in Neural Information Processing Systems (NIPS) 27, Montreal, Quebec, Canada, December, 2014. [pdf] [arXiv] [code] [video]
September 8, 2014: Johan Dahlin just started his pre-doc at the University of New South Wales (UNSW) in Sydney, Australia. He hosts are Robert Kohn at the Australian School of Business and Pierre Del Moral at the School of Mathematics and Statistics.
September 4, 2014: I am very glad to announce that Tobias Rydén will join us as an Adjunct Professor. Tobias main employer is Lynx Asset Management and he has perviously held Professor positions (mathematical statistics) at Lund University and KTH.
August 29, 2014: Received the Automatica best paper award for papers published in Automatica 2011-2013, link. Awarded for the paper; Thomas B. Schön, Adrian Wills and Brett Ninness. System identification of nonlinear state-space models. Automatica, 47(1):39-49, January 2011. [pdf] The award was handed out at the 18th World Congress of the International Federation of Automatic Control (IFAC), Cape Town, South Africa, August, 2014, where we also received a honorable mention (nominated for the best application paper award) with the paper Manon Kok, Jeroen D. Hol and Thomas B. Schön. An optimization-based approach to human body motion capture using inertial sensors. [pdf]
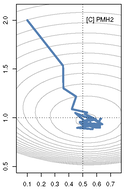
August 28, 2014: Our new results on Bayesian parameter inference in nonlinear dynamical systems have just been accepted for publication in Statistics and Computing. We introduce two alternative versions of the Particle Metropolis Hastings (PMH) algorithm that incorporate gradient and Hessian information about the posterior into the proposal. In the paper we show how to estimate the required information using a fixed-lag particle smoother.
Johan Dahlin, Fredrik Lindsten and Thomas B. Schön. Particle Metropolis Hastings using gradient and Hessian information. Statistics and Computing, 2014. (accepted for publication) [pdf] [arXiv] [code]
August 22, 2014: Christian Andersson Naesseth won the best poster award at the Summer school on deep learning for image analysis (held in Copenhagen, Denmark). The poster is available here and the papers describing the work in detail are available here and here.

August 18, 2014: During the summer a team of students have been working on realizing the CARS project, which is an acronym for Camera-based Autonomous Racing System. You can have a look at their result in this video. It includes a camera based target tracking system, controllers and of course the practical implemention of it all.
July 30, 2014:
 Recently we had two papers accepted. The first paper presents a maximum likelihood estimator for jump Markov linear models based on a combination of the particle filter and Markov chain Monte Carlo methods. In the second paper we derive a new Sequential Monte Carlo-based algorithm to estimate the capacity of two-dimensional channel models, yielding more than an order of magnitude improvement in estimation accuracy compared to existing methods. The underlying method is explained in a more general context in this video and in this arXiv paper.
Recently we had two papers accepted. The first paper presents a maximum likelihood estimator for jump Markov linear models based on a combination of the particle filter and Markov chain Monte Carlo methods. In the second paper we derive a new Sequential Monte Carlo-based algorithm to estimate the capacity of two-dimensional channel models, yielding more than an order of magnitude improvement in estimation accuracy compared to existing methods. The underlying method is explained in a more general context in this video and in this arXiv paper.
Andreas Svensson, Thomas B. Schön and Fredrik Lindsten. Identification of jump Markov linear models using particle filters. In Proceedings of the 53rd IEEE Conference on Decision and Control (CDC), Los Angeles, CA, USA, December, 2014. (accepted for publication) [pdf] [code]
Christian A. Naesseth, Fredrik Lindsten and Thomas B. Schön. Capacity estimation of two-dimensional channels using Sequential Monte Carlo. In Proceedings of the IEEE Information Theory Workshop (ITW), Hobart, Tasmania, Australia, November, 2014. (accepted for publication) [pdf] [arXiv]

May 28, 2014: Our recent explorations on the use of Monte Carlo methods (including sequential Monte Carlo) for real-time video based lightning has been accepted for publication at the 22nd European Signal Processing Conference (EUSIPCO) held in Lisabon, Portugal in September. This is very much introductory work for us and more will follow.
Joel Kronander, Johan Dahlin, Daniel Jönsson, Manon Kok, Thomas B. Schön and Jonas Unger. Real-time video based lighting using GPU raytracing, in Proceedings of the 22nd European Signal Processing Conference (EUSIPCO), Lisabon, Portugal, September 2014. (accepted for publication) [pdf]
May 21, 2014: We (Nicolas Chopin, Adam Johansen and myself) are organizing a workshop on sequential Monte Carlo methods at ENSAE in Paris during August 26-28 2015. More information is available here. Hope to see you there!
May 9, 2014: On June 5, Manon Kok will defend her licentiate thesis entitled Probabilistic modeling for positioning applications using inertial sensors [pdf]. The discussion leader will be Dr. Gabriele Bleser from the Augmented Vision group at the German Research Center for Artificial Intelligence. The thesis contains (among other things); A new optimization-based formulation of human motion capture (finding the position and orientation of human bodies) using inertial sensors and a new algorithm to calibrate magnetometers in the presence of metallic objects. The thesis is available here.
May 5, 2014: On May 28, Johan Dahlin will defend his licentiate thesis entitled Sequential Monte Carlo for inference in nonlinear state space models [pdf]. The discussion leader will be Dr. Adam Johansen from the Department of Statistics at the University of Warwick. The thesis contains (among other things): new methods for learning parameters in nonlinear dynamical models and it also studies the input design problem for nonlinear dynamical systems with some new insights. The thesis is available here.
April 24, 2014: We have two new papers accepted for the 2014 IEEE Workshop on Statistical Signal Processing (SSP) to be held at Jupiters on the Gold Coast in Australia in July. The first result is a new marginal particle smoother that is based on running a sequential Monte Carlo sampler backward in time after an initial forward filtering pass. In the second paper we make use of mixture importance sampling ideas to derive robust and efficient particle filters.
Joel Kronander and Thomas B. Schön. Robust auxiliary particle filters using multiple importance sampling. Proceeding of the IEEE Statistical Signal Processing Workshop (SSP), Gold Coast, Australia, July 2014. (accepted for publication). [pdf]
Joel Kronander, Thomas B. Schön and Johan Dahlin. Backward sequential Monte Carlo for marginal smoothing. Proceeding of the IEEE Statistical Signal Processing Workshop (SSP), Gold Coast, Australia, July 2014. (accepted for publication). [pdf]
March 25, 2014: We have recently developed a new algorithm for inference in latent variable models, state space models (both Markovian and non-Markovian) being one important special case. The algorithm belongs to the family of particle MCMC (PMCMC) algorithms. More specifically our algorithms builds on the Particle Gibbs sampler of Christophe Andrieu, Arnaud Doucet and Roman Holenstein available here. The work has been accepted for publication in the Journal of Machine Learning Research (JMLR)
Fredrik Lindsten, Michael I. Jordan and Thomas B. Schön. Particle Gibbs with ancestor sampling. Journal of Machine Learning Research (JMLR), 2014. (accepted for publication) [pdf] [arXiv]
March 21, 2014: The work carried out by Daniel Hultqvist during his Master’s thesis at Autoliv
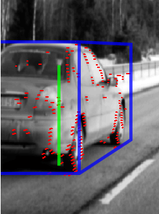 has been accepted for publication at the IEEE Intelligent Vehicles Symposium (IV). The contribution is a new algorithms for detection and positioning an overtaking vehicle using 1D optical flow.
has been accepted for publication at the IEEE Intelligent Vehicles Symposium (IV). The contribution is a new algorithms for detection and positioning an overtaking vehicle using 1D optical flow.
Daniel Hultqvist, Jacob Roll, Fredrik Svensson, Johan Dahlin and Thomas B. Schön. Detecting and positioning of overtaking vehicles using 1D optical flow. in Proceedings of the IEEE Intelligent Vehicles (IV) Symposium, Dearborn, MI, USA, June 2014 (accepted for publication). [pdf]
February 13, 2014: We just had some new results accepted for publication at the 19th IFAC World Congress (Cape Town, South Africa, August 2014). Very briefly, the results are; an empirical Bayes method for our previous GP-SSM construction, maximum likelihood calibration of magnetometers using inertial sensors, inertial human motion capture, the use of second-order information in PMCMC for Bayesian system identification, input design in nonlinear systems and an anomaly detection model.
- Roger Frigola, Fredrik Lindsten, Thomas B. Schön and Carl E. Rasmussen. Identification of Gaussian Process state-space models with particle stochastic approximation EM. [pdf]
- Manon Kok and Thomas B. Schön. Maximum likelihood calibration of a magnetometer using inertial sensors. [pdf]
- Manon Kok, Jeroen D. Hol and Thomas B. Schön. An optimization-based approach to human body motion capture using inertial sensors. [pdf]
- Johan Dahlin, Fredrik Lindsten and Thomas B. Schön. Second-order Particle MCMC for Bayesian parameter inference. [pdf]
- Patricio E. Valenzuela, Johan Dahlin, Cristian R. Rojas and Thomas B. Schön. A graph/particle-based method for experiment design in nonlinear systems. [pdf]
- André Carvalho Bittencourt and Thomas B. Schön. Data-driven anomaly detection based on a bias chenge model. [pdf]
January 6, 2014: We have just finished the full paper on the ancestor sampling version of Particle Gibbs. It contains significant original developments compared to the NIPS paper and the presentation is hopefully a bit more pedagogical.
Fredrik Lindsten, Michael I. Jordan and Thomas B. Schön. Particle Gibbs with ancestor sampling. Preprint at arXiv:1401.0604, January, 2014. [pdf]
[arXiv]
2013
December 6, 2013: If you are interested in a brief exposition of the use of sequential Monte Carlo methods (e.g. particle filters and particle smoothers) for nonlinear system identification you can have a look at this book chapter,
Thomas B. Schön. Nonlinear system identification using particle filters. Encyclopedia of Systems and Control (Eds. T. Samad and J. Baillieul) Springer, 2014. [pdf] [Springer]
November 21, 2013: Last Friday I was formally installed as Professor at Uppsala University. During the installation I delivered a popular scientific lecture on my research, available here (in Swedish).
November 8, 2013: After Christmas I will offer two PhD courses. In January I will give the course Computational Learning in dynamical systems at Universidad Tecnica Federico Santa Maria (UTFSM) in Valparaiso, Chile, the course flyer is available here. Back in Uppsala I will offer a course on Machine Learning, starting in February. Send me an e-mail if you are interested in participating in any of these courses. Welcome!
November 5, 2013: I have been awarded a grant from the Swedish Research council (VR). The project name is Probabilistic modeling of dynamical systems. It is a 4 year project worth SEK 3 880 000.
September 5, 2013: We have been able to construct and learn a Gaussian process (GP) state space model while keeping alive the entire nonparametric richness of this kind of model. We believe that it is the first time that this has been achieved. The key allowing us to do this is a new PMCMC method known as Particle Gibbs with Ancestor Sampling (PG-AS). We have a feeling that these inference methods are useful also for other Bayesian nonparametric models. The new results will be published at NIPS in December.
Roger Frigola, Fredrik Lindsten, Thomas B. Schön and Carl E. Rasmussen. Bayesian inference and learning in Gaussian process state-space models with particle MCMC. Advances in Neural Information Processing Systems (NIPS) 26, Lake Tahoe, NV, USA, December, 2013 (accepted for publication). [pdf] [supplemental]
September 2, 2013: Starting my new position as Professor of the Chair of Automatic Control at Uppsala University. I will continue to be affiliated with Linköping University.
August 11, 2013: On October 25, 2013, 10.15, Fredrik Lindsten will defend his PhD thesis. Arnaud Doucet (Professor of Statistics at Oxford University, UK) will serve as faculty opponent. The grading committee consists of Prof. Tobias Rydén (Lynx Asset Management), Doc. Joakim Jaldén (KTH) and Prof. Mattias Villani (Linköping University). The thesis is entitled Particle filters and Markov chains for learning of dynamical systems [pdf].
June 17, 2013: Our new tutorial on particle smoothing methods is now accepted for publication in Foundations and Trends in Machine Learning,

[J16] Fredrik Lindsten and Thomas B. Schön. Backward simulation methods for Monte Carlo statistical inference. Foundations and Trends in Machine Learning, 2013. [pdf] [now]
This paper is written with the intent to be a self-contained introduction to particle smoothing in a general setting, not just confined to standard nonlinear state space models. More precisely, we discuss the use of forward filtering/backward simulation techniques, addressing both smoothing and parameter inference problems.
May 28, 2013: Johan Kihlberg and Simon Tegelid have been awarded the best Master's thesis award 2012 by Dataföreningen - öst. The thesis is entitled "Map Aided Indoor Positioning" and it is available for download by clicking here.
May 22, 2013: I have been awarded the Best PhD thesis award 2013 by The European Association for Signal Processing (EURASIP). "The selection process is based on the evaluation of the impact of the theses, their subsequent journal and conference publications and related citations received, and on the review reports of three independent reviewers as well as on the download statistics." The thesis entitled "Estimation of Nonlinear Dynamic Systems: Theory and Applications" is available here and the announcement is available here.
April 22, 2013: I am very glad to welcome Roger Frigola, who is visiting our team for a couple of months. Roger is a PhD student with the Machine Learning group at the University of Cambridge (UK).
March 7, 2013: Our new method for Wiener system identification has been accepted for publication in Automatica. The method avoids making strong assumptions, such as monotonicity, on the nonlinear mapping. Stochastic disturbances, entering both as measurement noise and as process noise, are also straightforwardly handled. The inference algorithm is based on an efficient particle Markov chain Monte Carlo (PMCMC) method, referred to as particle Gibbs with ancestor sampling (PG-AS).
[J15] Fredrik Lindsten, Thomas B. Schön and Michael I. Jordan. Bayesian semiparametric Wiener system identification. Automatica 2013. [pdf]
March 1, 2013: We have some new results on the following topics; particle smoothing, PMCMC, modeling of magnetic disturbances and localization using magnetic maps. The underlying papers have been accepted for publication at the 38th International Conference on Acoustics, Speech, and Signal Processing (ICASSP) to be held in Vancouver, Canada during May 26-31, 2013.
[C64] Fredrik Lindsten, Pete Bunch, Simon J. Godsill and Thomas B. Schön. Rao-Blackwellized particle smoothers for mixed linear/nonlinear state-space models, in Proceedings of the 38th International Conference on Acoustics, Speech, and Signal Processing (ICASSP), Vancouver, Canada, May 2013. [pdf]
[C63] Manon Kok, Niklas Wahlström, Thomas B. Schön and Fredrik Gustafsson. MEMS-based inertial navigation based on a magnetic field map, in Proceedings of the 38th International Conference on Acoustics, Speech, and Signal Processing (ICASSP), Vancouver, Canada, May 2013. [pdf]
[C62] Niklas Wahlström, Manon Kok, Thomas B. Schön and Fredrik Gustafsson. Modeling magnetic fields using Gaussian processes, in Proceedings of the 38th International Conference on Acoustics, Speech, and Signal Processing (ICASSP), Vancouver, Canada, May 2013. [pdf]
[C61] Johan Dahlin, Fredrik Lindsten and Thomas B. Schön. Particle Metropolis Hastings using Langevin dynamics, in Proceedings of the 38th International Conference on Acoustics, Speech, and Signal Processing (ICASSP), Vancouver, Canada, May 2013. [pdf] [code]
[C60] Ehsan Taghavi, Fredrik Lindsten, Lennart Svensson and Thomas B. Schön. Adaptive stopping for fast particle smoothing, in Proceedings of the 38th International Conference on Acoustics, Speech, and Signal Processing (ICASSP), Vancouver, Canada, May 2013. [pdf]
January 22, 2013: In an attempt to provide a quick and easily accessible introduction to my research I have written an overview of my research activities, which is available here.
2012
November 28, 2012: During the period January - March 2013 I am offering my PhD course in Machine Learning. More information about the course is available here. Let me know if you are interested in participating. As usual participants from industry are also welcome.
October 8, 2012: I am offering two editions of my new PhD course Computational Inference in Dynamical Systems. During October 17-18 it will be given at the University of Sydney and during November 19-23 it will be give at the Royal Institute of Technology. If you are interested in following the course you are most welcome!
September 28, 2012: On November 9, 2012, 10.15, Karl Granström will defend his PhD thesis. Prof. Ba-Ngu Vo will serve as faculty opponent. The thesis is entitled Extended target tracking using PHD filters [pdf].
September 4, 2012: We have developed a new particle MCMC method, that we refer to as particle Gibbs with ancestor sampling (PG-AS). Similarly to the existing PG with backward simulation (PG-BS) procedure, we use backward sampling to (considerably) improve the mixing of the PG kernel. Instead of using separate forward and backward sweeps as in PG-BS, we achieve the same effect in a single forward sweep. This result has been accepted for publication at NIPS this year,
[C59] Fredrik Lindsten, Michael I. Jordan and Thomas B. Schön, Ancestor sampling for particle Gibbs, in Advances in Neural Information Processing Systems (NIPS) 25, 2012. [pdf] [supplemental] [NIPS]
August 14, 2012: The final program for our workshop on Moving Horizon Estimation and System Identification to be held in Leuven, Belgium, August 29-30 is now available. Click here for details.
July 8, 2012: Our new maximum likelihood based method for identification of Hammerstein-Wiener model structures is capable of handling a very general situation, wherein multivariable data, non-invertible Hammerstein and Wiener nonlinearities, and colored stochastic disturbances both before and after the Wiener nonlinearity are all catered for. This new result has been accepted for publication in Automatica.
[J14] Adrian Wills, Thomas B. Schön, Lennart Ljung and Brett Ninness. Identification of Hammerstein-Wiener models. Automatica, 49(1): 70-81, January 2013. [pdf] [Automatica]
Older news are available here.