It's about a computational approach to derive sub-optimality guarantees.
You want to know how much the solution can be trusted . . .
The Central Idea
Let  be an optimization problem structure with given and optimization variables partitioned as (v,x).
be an optimization problem structure with given and optimization variables partitioned as (v,x).
Example:


Now suppose is a “difficult” optimization problem; however,
A sequence
 of
of  can be constructed such that the associated global optima of the problem, viz.
can be constructed such that the associated global optima of the problem, viz.  are known for any
are known for any  , and the “distance” between and , is decreasing with
, and the “distance” between and , is decreasing with  .
.
A sub-optimality guarantee of the obtained solutions
 can be efficiently computed using the distance between and .
can be efficiently computed using the distance between and .
Then, computational sub-optimality guarantees can be obtained along with the approximate solutions, that might
outperform existing analytically derived sub-optimality guarantees, or
be the only class of sub-optimality guarantees in cases where no a priori known analytical guarantees are available for the given problem.

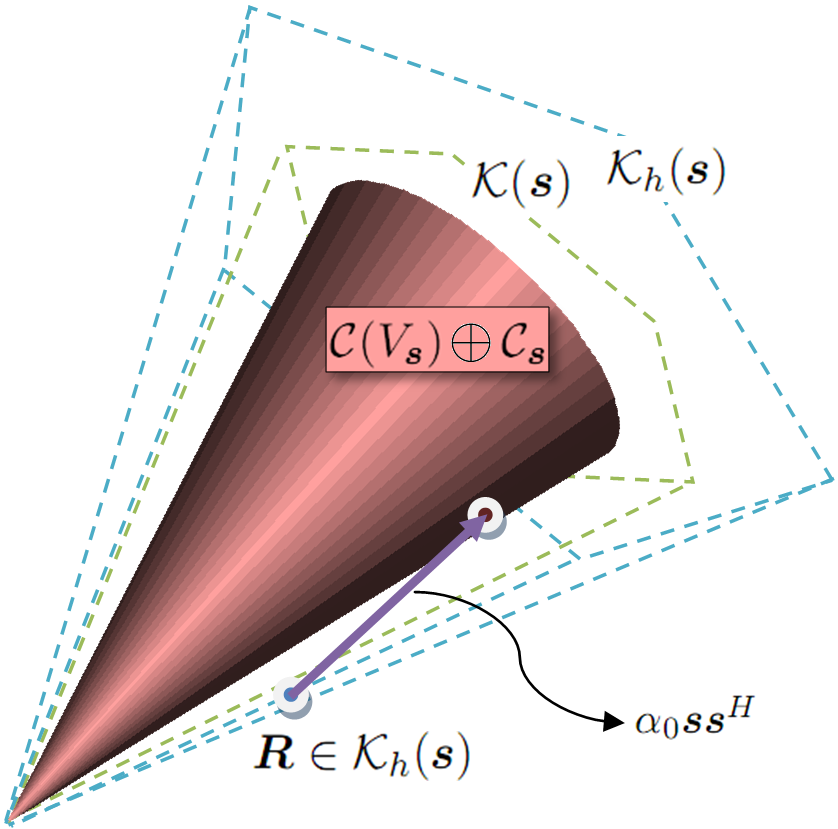 |
An illustration of the cone approximation technique used for MERIT's derivation in unimodular quadratic programming. See Applications for details. |